
The off season in my mind has been a success. Our team has come so far compared to off season last year. We might not have finished all of our deliverables or goals but we have had students learning, training, and doing the work that we will be asking them to do during the real season.
Some things we’ve completed
- Successfully running one motion profiled path at the correct distance(ie 6ft line goes ~6ft)
- 2014, 2015, and 2018 robots have been returned to working order
- Updated the code for all robots to 2019 version so we can deploy with visual code
- Massive amounts of cleaning in both shops.
- Reorganization of both shops
- 70% of our field perimeter
- Held strategic design workshops
- Cad practice
- Prototyping practice
We’ve changed some things on the team management side. Our team has decided to properly enforce attendance requirements. This year we have mentor responsible for taking attendance at every meeting and required outreach event. We also cut out any activities not related to the robotics team in our shop during team meetings. We did this by giving warnings to team members and after two warnings in a day they would be sent home. These changes have increased student attendance and productivity. This off season we have had 28 students who have attended greater than 80% of our team meetings.
Another thing we started doing new this year was a formal team meeting at the start of each team meeting, these are short 5 minute or less house keeping meetings that serve as the official start signal and allow us to communicate better. We have also pushed students to make use of Trello and our Kanban style of tracking work.
Although we didn’t finish everything up that we wanted to at the start of off season we are at such a better spot now than compared to last year.
The Kick Off Plan
We approach kick off in the way many teams do. We break down into group and then go through and read the rule book, then each group presents their findings to the team. This action of breaking down into groups and presenting to teams is repeated for, brain storming robot actions that score points, and scoring analysis. After we have completed these items we decide on a ranked priority list of actions that we want our robot to be doing.

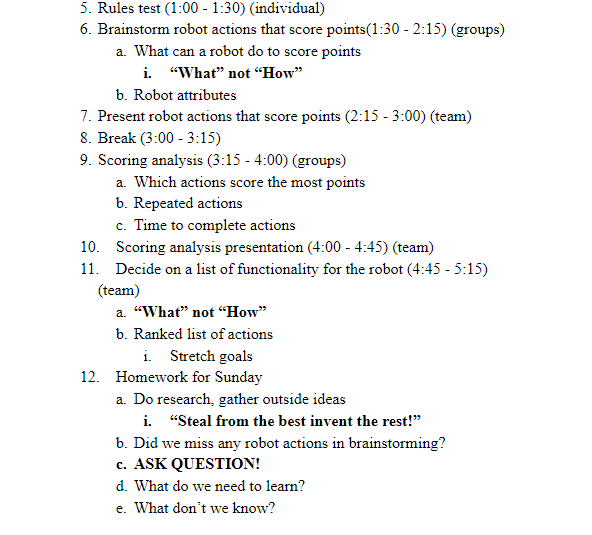

One thing we’ve struggled with is determining how many robot actions our team can choose. The ausTIN CANs are not a team that gets to do it all so we have to carefully choose which actions we attempt and deciding where to draw the line is hard. Choosing to do too much will spread our resources too thin. We are most likely going to go for a strong independent robot that can score enough points to win games, and get one of the extra rps(assuming we have 4 rps again this year).
I’ll be attempting to publish a blog for every team meeting about our progress, strategy, and our forward direction.

Leave a comment