
Prototype Shooter
Today we improved the prototype shooter. We added a base to the legs, and put some batteries for weight on the base. This improved our consistency significantly! The shooter was flexing before on each shot, but after our improvements it barely reacts to shooting a power cell.
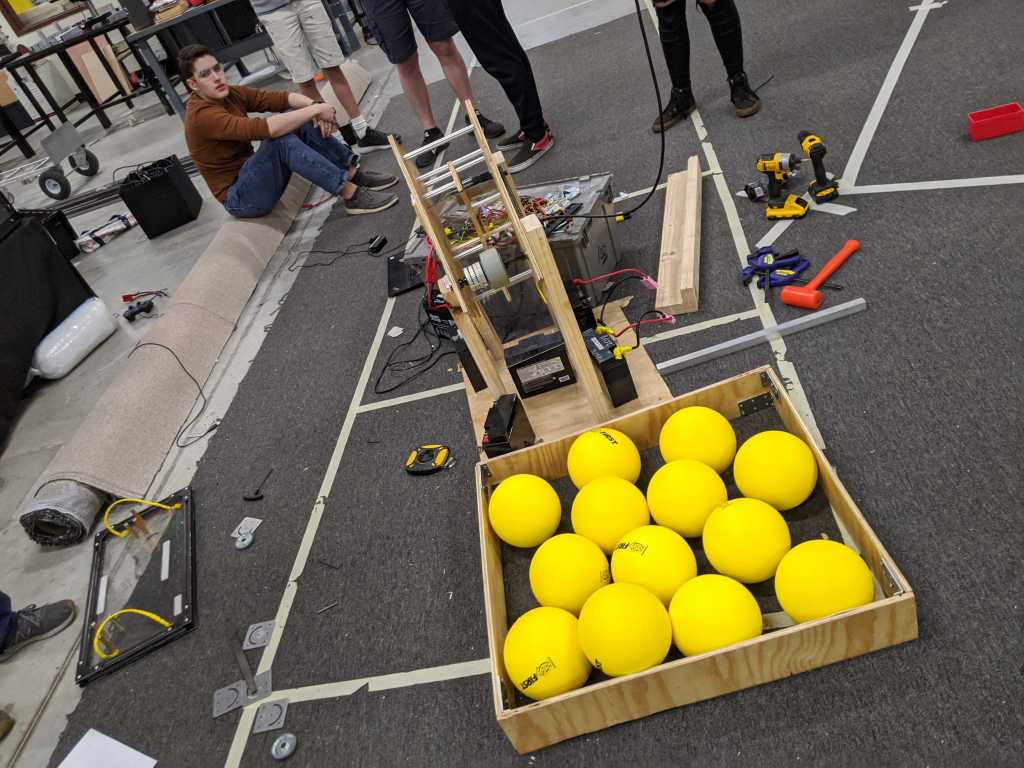
The shooter still has a slight problem, some what randomly a shot will fall low and just barely miss the power port outer opening. The shooter probably launched the balls over a 100 times today. Our building has ceilings that aren’t the highest, and sometimes our shot will go high on a trajectory to score but then hit a air duct right above our power port. We took some slow motion video during testing, the first shot goes in, second shot just barely misses, and the final shot makes it.


After watching the video over 10 times I’m still not noticing anything different between the shots. The shooter was at the same speed at the start of each shot. The next steps to improve shot consistency is making a prototype conveyor to deliver the power cells into the shooter. Hopefully this solves the random shots going low.
Prototype Hopper
Today three pieces of the hopper assembly were cut on the router and the CAD team began assembly of the prototype.
Manufacturing
Today we cut the first half of our gearbox plates on our CNC router. This is the first custom gearbox our team has made in a long time, and so far it is going good. We currently have about half of the shafts done for the gearbox and drive train. We have ran into a wall because we had to order a slotting tool in order to cut the E clip grooves.

The manufacturing team also claimed some table space in our big shop today to start assembly of our two robots. Two robots means twice the work, twice the tables, and assembling everything two times. We made the choice to go for two robots this year in order to keep hours, (wear and tear) down on our competition robot. We plan on running practice sessions as much as possible this year.

Programming
The programming team was super excited today, they got the lime light fine tuned and auto aligning to the power port vision tape is working great. It took some iteration on the controls side of things but now the driver holds a button and drives, if the lime light locks onto the vision tape it will auto align and the driver can no longer turn but still drive forwards or backwards. We think this is the version that we’ll spend most of our time practicing with.
Auto Aligning 
Re-purposed Bumper Brackets into Limelight Mounts
Getting a lime light has made vision much easier than last year, when we attempted to use a grip pipeline running on a Jetson. I’m sure given enough time we could have gotten that working but this allows us to move onto auto, path tweaking, controls improvements, and dashboard improvements.

Leave a comment