
Programming
We had some issues trying to toggle the lime light’s light on or off. It was flickering randomly, this caused us to investigate the code deeper. We found that we were always returning true for isFinished(), which was causing the command to be recreated after every execution. We fixed that and moved on with the review, a drive command was manually being schedule from within another command, so we removed that. We also set the default command of the drive base correctly. The WPI lib changes have moved how you do a few of these things and the programmers got hung up on it. In the end we got it all sorted out and although no new features have been added the code is much cleaner and should work better now.
During testing a bearing fell out on the kit bot. We’ve probably assembled something wrong but for now we just put the bearing back in. If your team doesn’t have a dedicated test bed, and you opt out of the kit bot every year, consider picking up the kit next year. Assembling the kit bot is a great learning experience for students and its great to have a dedicated test chassis for driving or prototyping on top of.
Flywheel shooter
We attempted to lower the angle of the flywheel shooter today, our intent was to flatten out our shot. After putting a few power cells through it we discovered that the polycarb backing had shifted in the slot by a 1/4″. After pushing the polycarb back into place we were now shooting to low. So we shifted the angle back to the original and our arc was now flatter.
Another improvement we tested today was removing the crown of the colson wheel. To do this we put the wheel on a hex shaft, and put in on the lathe then applied a coarse file until the crown of the wheel was removed. We only tested the fly wheel shooter for 12 shots after making this modification, so no real proof that this change did anything to improve consistency.

Prototype Conveyor
The prototype conveyor to feed balls into the shooter was almost finished today. All that is left is adding on the top side of polycord. This prototype should allow us to test shooting five power cells in rapid succession. It is also a test of how polycord will work for an internal conveyor that could exist inside the robot.
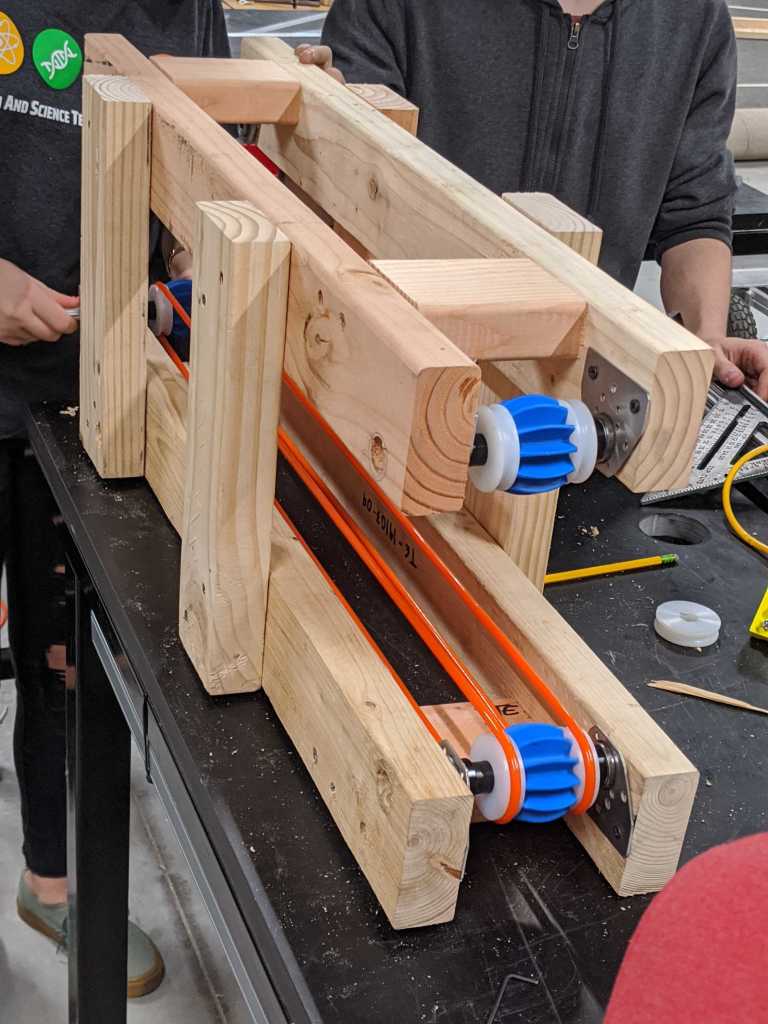
Prototype Hopper
Our hopper prototype progressed nicely tonight, it was ran for the first time. This prototype is in the style of 6135, 4481, and 95. We are going to add another piece of wood to better retain the shafts. The bottom section of rollers didn’t seem to be needed or add any benefit.

Manufacturing
Today was an exciting day for manufacturing, we ran our Haas for the first time in a year and a half. We were cutting a bearing holes in varying sizes in order to find the right press fit that we will use on the robot. Its nice to see the big machine being used again.
Prototype Climber
We’ve had lots of talk on this front and no progress yet. We still haven’t completed the generator switch, and this is stalled out. We attempted to shift more students into the task to progress it along quicker.
Timeline
We’ve made great progress with prototyping of shooter, intake and hopper. The climber which was highest on our priority list has made the least progress, hopefully we can correct this during this upcoming weekend. Scheduling is hard, an optimistic goal I’ve had is by the end of week 3 we have CAD complete on our major subsystems to play the repeatable parts of the game. This would allow us to practice what we’ll be doing for 95% of match time, leaving only the end game to finish up. We have two subsystems, intake and shooter, that are mostly complete with the prototype. I’m hoping that we keep our foot on the gas pedal, and we keep pushing ourselves and are able to hit this goal.

Leave a comment