
Programming
The programming team worked today on fixing code review comments. This is the first year we are doing full code reviews of code before they get merged into the master branch. This has been helpful for the students by improving their code quality and catching tricky bugs. Today two independent teams were working on getting the Ramsete controller working for path following.
Manufacturing
Today more gear box plates were cut on the Haas, we have about three more plates to cut. The rest of students were busy cutting stand offs for the first version of the shooter going on the robot. We also assembled our first drive gearbox today!
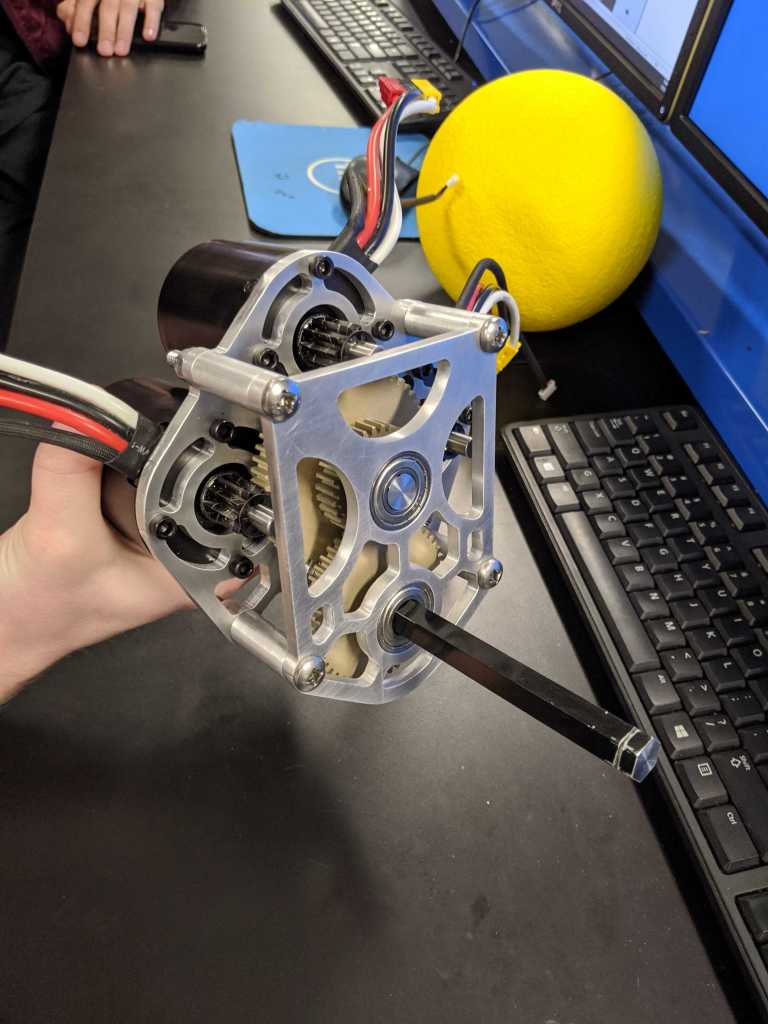
Assembled Gearbox 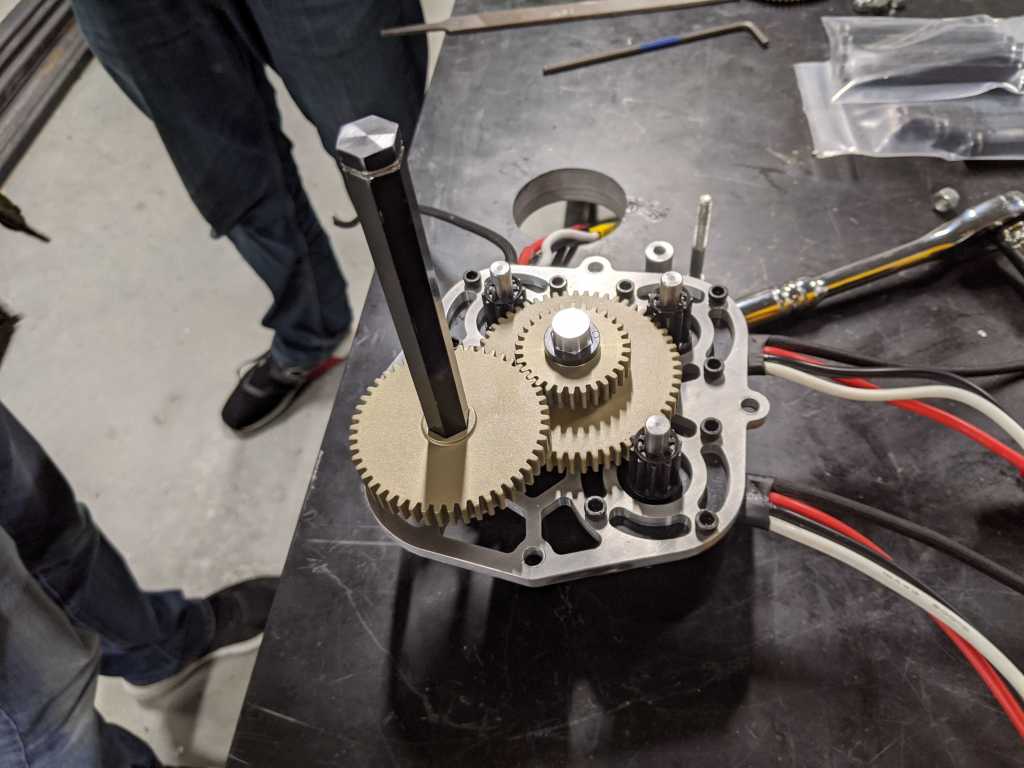
Outer Plate Removed
The gears meshed nicely, tomorrow we will hook up a motor and run the gear box dry for the break in period. The shooter also got its movable hood, and metal bracing cut on the router today. Saturday we should be able to cut the main part of the metal hood on the router and assembly can begin.
CAD
The elevator took a few steps back in progress today, but it should be for the better. We boxed ourselves in a corner with where we had the elevator in the back against the drive rail, and we also didn’t like how we were mounting it low at the bottom of the belly pan. We didn’t like the low mounting because we had to space off the side drive rails in order to provide clearance to the chain, this then made it hard to attach any bracing to the elevator. So after some talking it was decided to move the elevator more towards the center of the robot, set it on top of the side drive rails, and change the elevator material to 1″ x 2″ aluminium. These changes will take some time to implement but it greatly simplifies placement and attachment of the elevator. Because we are setting the elevator ontop of the drive rails we lose 2″ in every stage and our reach will top out at 55″ when we need 63″ when the generator switch is level. We will becoming up with some clever ideas to get the last foot or so of needed reach.
A hopper prototype was assembled and tested today. It quickly and easily moves the balls into center. It doesn’t seem to have any problems with jamming. This is the subsystem that is furthest behind but its good we are making progress on it, hopefully detail cad work can begin soon.

Field Build
Today the first driver station made its way into the shop, where it got some diamond plate attached to it. It will eventually get polycarb attached for the competition like experience.


Leave a comment