
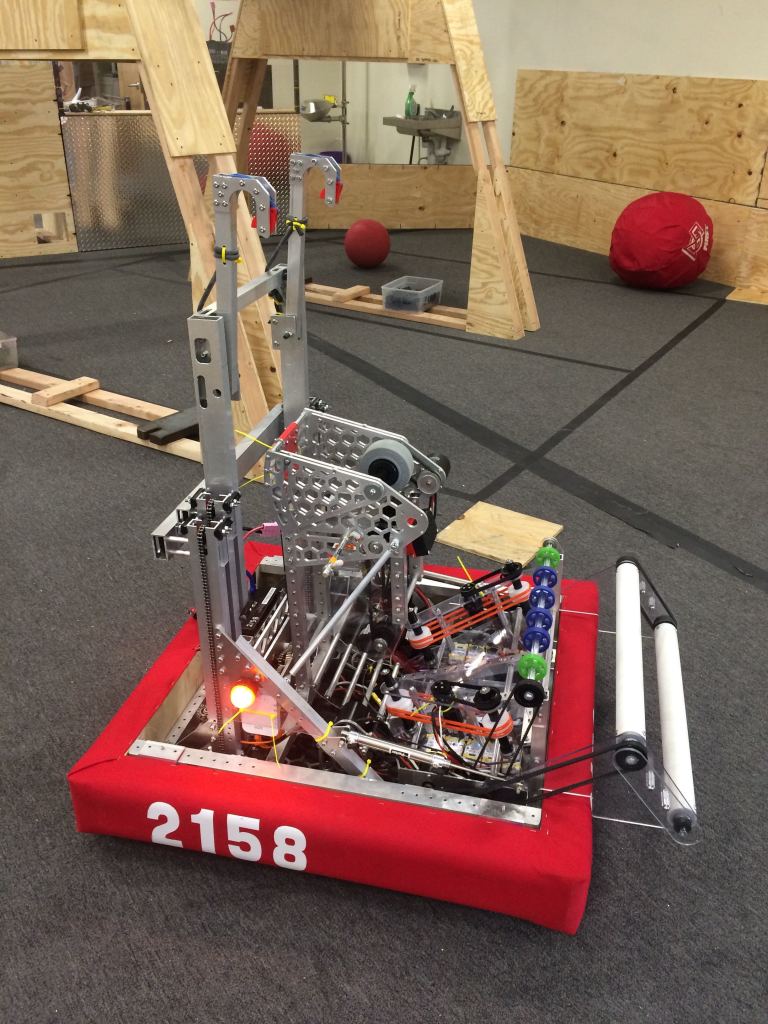
Today was the day that we as a team have been waiting for. Its the day where all the pieces were dropped into place and everything came together on the robot. Here’s what the robot looked like at about 4 PM on Saturday.
We tested the intergration between the hopper, conveyor, and shooter for the first time today. It works okay if there are 3 power cells in the hopper. It quickly goes down hill if there are 4 or 5 power cells in the hopper.
The robot likes to slice the power cells if anything jams up. This is really not good, its one of our top priorities to solve before Del Rio. When something gets jammed, the pullies that can touch a power cell make a nice smooth cut almost instantly. The team quickly iterated to the next design version, the hopper got taller, moving the pullies away from the power cells. The hopper also got a belt and pulley 3d printed guard. The bottom set of rollers on the hopper got moved further back, hopefully eliminating a gap for power cells to get stuck in. We also decided to use crowned rollers and poly belting instead of poly cord.
The shooter has a few design flaws at the moment. The cylinder we ordered for the hood is too long in the retracted position, and just long enough extended. So the hood of the shooter currently sits 1/8″ from the top of the slot. The shooter also only can make the scoring zone shot with the additional 1/8″, ie the shooter not sitting flat. The ball basically shoot straight up into the air. The far shot works pretty well.
This brings attention another one of our problems we found on Saturday. We are currently sitting at 28 1/4″….. Strange.
Its not like that in CAD I hear. People begin talking about ways to drop height, then the CAD lead notices that some one assembled the conveyor’s polycarb wrong and its off by half an inch. The error was corrected and we still had to reclaim some height in order to comfortably be able to fit under the trench. The movable plate of the hooded shooter gets trimmed down with a dremel tool to reclaim back another 1/4″ of an inch. The robot currently sits at 27 3/4″.
The robot weighed in at exactly 125 lbs on our cheap digital scale. Que alarm bells going off in everyone’s head. That’s not good. The bracing for the elevator was taken off and a lightening pattern was quickly made up in CAD.

The hopper improvements are going to add some weight. There is also a much needed piece of polycarb that deploys the spring action of the hooks that still needs to be added to the robot. Everything is coming down to the wire. We have four days before Del Rio and a long list of stuff to do, including autonomous and drive practice.

Leave a comment