
Friday
The trailer and load in team left Austin at 9 am, other groups of students and mentors left during the next four hours. Our load in team arrived hilariously early, but they got to be the first ones in line. My car left around noon, and we arrived 20 minutes before the pits were opened to teams. The schedule for Thursday was loading, pit setup, inspection and field calibration.
A new addition to our pit this year was the stage lighting truss. The trusses seemed to go up easily (I watched the students put it up), not sure how much they enjoyed putting it up. While watching some students setup the pit, we decided to go at our first pass of inspection. We had been there for all of 10 minutes before we started inspection, this is a new personal best for me. Inspection went by with only a few minor pains, we had to remove the hopper and roborio so the inspector could see the wires going to and from the power distribution panel. One of the downsides of small robots. The team managed to pass inspection on the first try, the clock read 5:30, the first team done with inspection at Del Rio. Another two first for me, first time inspecting so soon, and first time being the first team to pass inspection. Our inspection weight was 124.6 pounds.
With inspection done the team set out working on the to do list we wrote the previous day.
- Fix air leak
- Replace standoffs in elevator with new version
- Teflon backing to conveyor
- Add elevator caps
- Grease Hooded shooter slide
- Loctite piston rods into clevis
- Wire power cell sensor
- Sponsor plate
The pit crew quickly went to work, one group removed the shooter polycarb, to add the Teflon backing, another replacing the stand offs holding the elevator stage bracing, and a final group worked on adding the elevator end caps. The elevator end caps were a bit hard to put in, but after they were added the elevator returned to the rigid structure it once was. The end caps also make retaining the bearing blocks easier, tapped mounting holes eliminate any problems we had fitting bolts, and washers in the 1″ x 2″ tubing. The sponsor plate was cut with a jig saw, and the vinyl sticker was applied. We got some air bubbles in it, and you can’t see it very well on the clear polycarb, an improvement will need to be made.
With all of those changes being made we were back to inspection. We knew we were going to be over weight just didn’t know by how much. Some students had some sticker shock when the saw the weight of the robot, 126.2 pounds. Back to the pits to work on some weight reduction. The hook was made out of two 1/4″ aluminium plates separated by spacers, there are two of these hook assemblies on the robot, so we removed one of the plates, and all of the spacers for each of the two assemblies. A piece of 1″ x 1″ aluminium was removed from the front of the hopper. The intake belting was configured to the correct version using side with pullies rather than two. We had two sides being used to power because we ordered wrong belts at one point and never got around to fixing it.
All of these modifications done and back up to the scale we go, this time the robot weighed in at 124.7 pounds. A collective sigh of relief was breathed and the step drill bit was put away(with out seeing any use). The event setup was running behind schedule so the field did not open for vision calibration in time.

Saturday
Saturday got off to a slow start, the field was still being put together(it was this fields first time being used this season, so the volunteers had to do the typical week one work). Practice matches were removed in order to attempt to stay on schedule. The programming team finally got access to the field and had time to calibrate the lime light. They remarked that the lightning was better at the venue then in our shop, so that is a plus.
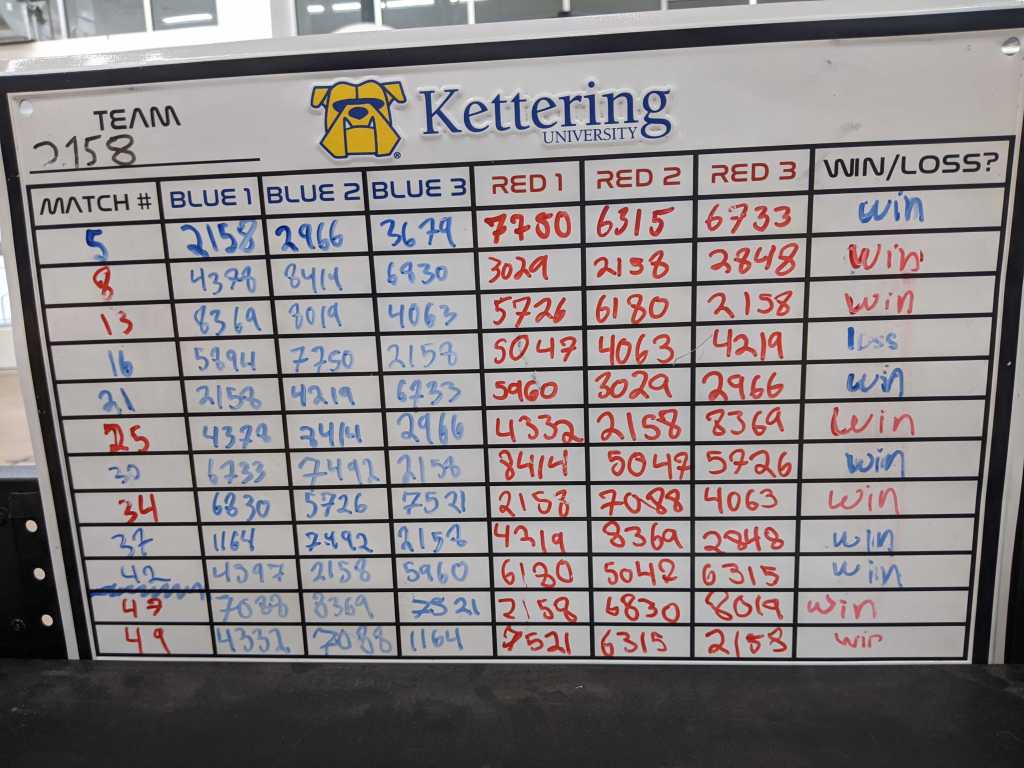
Its a shame that we didn’t get any practice matches in. A down side of district events I guess. The schedule was released and we found out we’d be playing in event qualification match 5. Starting the day off quickly. We hadn’t been able to find and fix the air leak yet. We opted to run our 5 power cell autonomous that lines up with the trench mode. The match took a while to start and whilst waiting all the the robot’s air pressure leaked. When it came time to shoot the hood didn’t have enough air pressure to deploy. The robot shot 3 power cells straight into the ceiling. That was fun.
During the first match we’ve discovered just how bad our intake was. The intake was down trying to grab a power cell under the wheel of fortune when the driver turned the robot too quickly and the intake flew apart leaving pieces on the field. We decided to just drive over to the generator switch and wait until end game and climb. After a successful climb the team picked up win for the first event of the day.
The time between the next match was spent looking for a air leak, and reassembling the intake. The intake was fixed, with no luck on the air leak, we decided to pressurize until we put on field, then hope the match started quickly. No luck, some teams had trouble connecting to their robots and we lost all of our air pressure. The head ref allowed us to re pressurize because the match took 8 minutes since we took the field. We knew we had to find that air leak in order to run our 5 power cell auto. The team worked on gathering power cells and shooting them in, the outer goal with out much luck. It was proving to be impossible with the current intake to acquire power cells quickly. End game started and we once again quickly climbed the generator switch. Another win, the day is going well.
Back to the pits, we need to fix the air leak, and make the intake able to acquire power cells. District events have a quick turn around, Del Rio had a particularly quick turn around, with only 26 teams attending we have an average of ~4 matches before we needed to be back out on the field. We were once again unsuccessful with the air leak, and decided to run the safer auto, that drove up to the scoring zone, and shot 3 power cells into the outer goal. We struggled with in taking power cells, and climbed once again in endgame. This cycle repeated it self the rest of the matches during the day. We had another minor break down the intake, one cylinder got bent pretty badly and we could no longer control its position. The cylinder was replaced in the pit before the next match.
We ended the day with a record of 9 – 1, our only match we lost by five points, close one. After eating a team dinner the scouting team set off to making a pick list. We were seeded rank two, which meant we’d be a picking team. The strategy team created a list of seven best alliance partner’s we’d like to play with. Another list was created for the lower end of the bracket. Del Rio had a very small number of teams, so all but two teams would be picked. Scary thought as rank two, ending up with only four robots to choose from.
Sunday
Oh day light savings time how I hate you. Waking up an hour earlier after a late night discussing alliance picks is not something I enjoy. Especially when we are driving home after the event finishes.
The intake had some pieces removed from it, and the speed dropped and it remarkably started working better. The rest of the qualification matches went well. Another two wins to bring the record up to 11 – 1. After qualification matches finished we went to inspection and reweighed, still at 124.2 pounds, we removed some stuff from the intake that made it work better. With this weight we added another pneumatic air tank, this new air tank pushed us up to 124.9 pounds. Perfect.
We made the difficult decision to decline to be alliance partners with the number one seed. Alliance selection turn out interestingly, with the number one seed being turned down twice. We selected team 1164 Project Neo as our first pick alliance partner, and selected team 7088 as our second pick.
The additional air tank solved our problems with the air leak for now, as long as elimination matches started within 6 minutes of us entering the field we should have air pressure. Quarter final matches were exciting where we figured out how to play well as an alliance. Team 7088 was doing zone defense along the initiation line. Team 1164 was shuffling power cells into the low port. When it came to end game, we climbed with team 1164. This strategy got us through quarter finals, and semi finals.
Finals was interesting. Our climber broke at some point, maybe during finals match 1, the climber got stuck trying to deploy. Eventually the climber deployed and we got one hook touching the bar. We attempted to climb but only managed to get three wheels off the ground, another half second and we’d have been in the air. We lost finals match by 33 points. The climber worked some what during testing in the time between finals match 1, and finals 2. The decision was made to leave the hooks deployed, and the climber up as close to the 45″ height limit as possible. We’d be playing this match as a tall robot in an attempt to get the climb still. That didn’t work out but we won finals match 2 pushing it to a tie breaker because of a penalty on the red alliance. Finals 3 we acknowledge we weren’t going to be able climb and decided to push the climber back down and just score as many power cells as we could. The red alliance captain tipped over right after driver control started, and we won finals match 3. First time winning an event for team 2158(and me).
Our car stayed afterwards and helped with field tear down. I’m always amazed at the level of tetris that gets the field packed into the smallest amount of space possible. Afterwards we got some great local food before driving the 4.5 hours home.

Leave a comment