
The team started today’s meeting with a debrief of Del Rio. We create a simple list of good and bad things that happened at the event. These don’t have to be robot related and we encourage everyone to join the discussion.
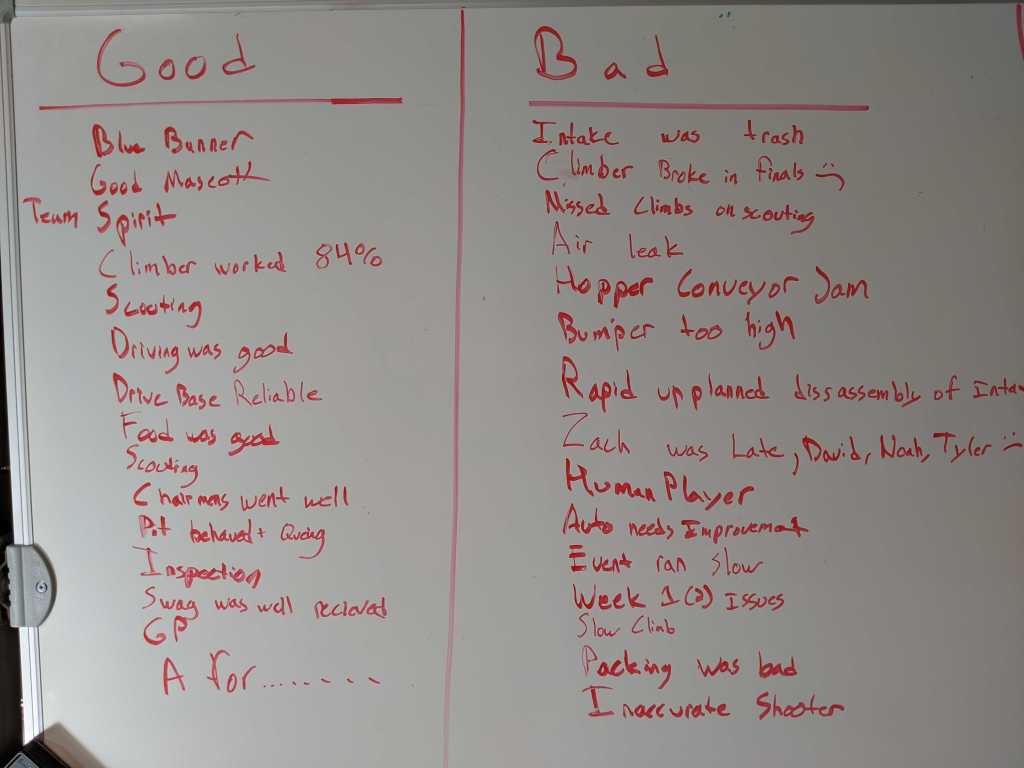
Overall Del Rio seems to have been a positive and enjoyable experience for the students (I’m sure winning contributed to that). Most of the stuff in the bad column is related to robot performance, we have a few issues that are not related to the robot which we can fix. The pit seriously needs to be better packed, and our human player could get less fouls. The human play only got two fouls, so no harm, but it can be less.
There were a large number of things that went poorly on the robot. The intake was bad, the transition from the intake to the hopper was bad, the transition from the hopper to the conveyor is bad. We also had an air leak we could not find, the climber was inoperable in the final three matches.
There was a lot of talk about throwing away the hopper, and conveyor and moving to a spin indexer, before the Austin event. Another group was against that idea(for good reason).
The pro side argument of changing to a spin indexer is the elimination of power cell transitions, eliminating places where power cells could stop moving against each other.
The against side of the argument was that we don’t have enough time before Austin, and that we need to make any small improvements so that we can have a complete robot at Austin.
The against side eventually came out on top with the reasoning of not enough time before Austin event. So we made a prioritized list of things to fix in the next 8 days.
So we got started on making progress. The air leak was found to be in a push connect fitting on the solenoid block. A spare 3 slot solenoid block was prepped and put into place, we haven’t pressurized the whole system yet so not sure if we have others. A 3d printed air tank mount for 3 accumulators was printed.
The climber was disassembled, down to the planetary gearboxes themselves. Nothing was broken or out of place. Strange. The current theory is that the elevator timing skipped and the gears and chain got out of sync and got to a point at which it bound preventing it from extending any further. We need to reassemble the elevator and test it.
We are using the disassembled state of the elevator to add pocketing to the stage zero plate. After pocketing both sides, we have lost 1 pound. CAD also pocketed other parts of the robot for another pound of weight savings. Every pound right now is weight we can add to the hopper or intake to make it better.
The intake started getting revisions created in CAD, and the hopper is under going some testing in the shop to see if there are small tweaks that we can make to solve the jamming.

Leave a comment