
Build season is almost upon us, we’ve spent the past few weeks doing department based training. We’ve finally selected our student leaders(some what later than usual). Our big fall shopping order is finally complete(more on that later). There are two weeks of meetings left before winter break. So what have the departments been up to?
CAD
CAD started off the season with a deep dive into gearboxes. Our students new to CAD each designed a single speed two stage drive gearbox. The CAD team also worked on creating an intake and “shooter”. The intake and shooter are designed to fit on our upcoming CANDrive, intake a 2020 power cell(from front and back) and expel the power cell into the 2020 low goal. Whilst designing the intake and shooter the students learned how to document their design process into a PowerPoint. This is a new approach that we are testing this year to record our design process.
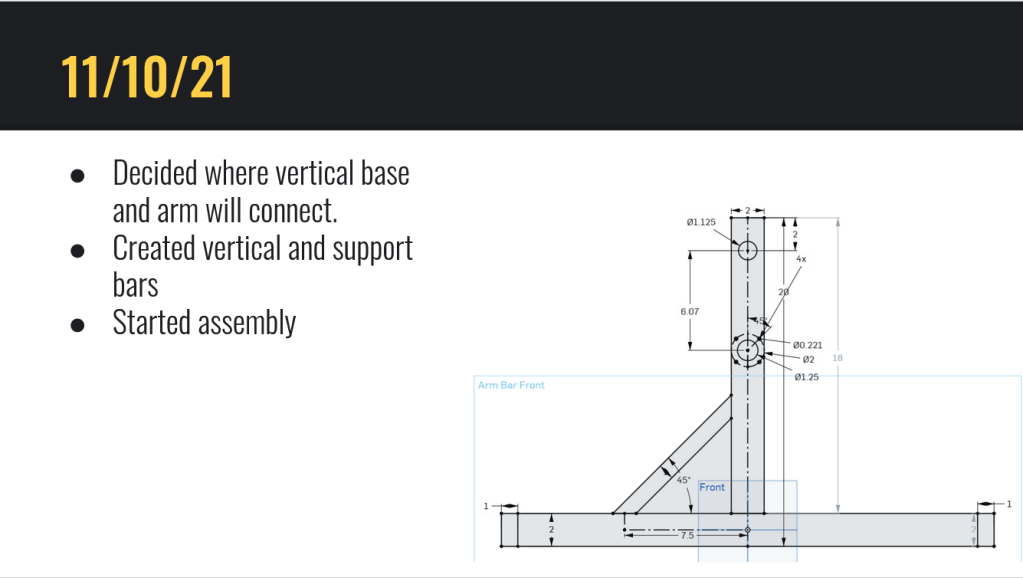
We’ve also started a more formal design review process. At key points during the season our design team will be presenting the current design and exploring the design in depth. This will hopefully provide a chance to catch mistakes, find any flaws, and prevent creating creating parts that are impossible to assemble(Like our 2020 elevator that took hours to assemble and a few custom nuts…).
PROGRAMMING
Programming has been busy learning git, and Java. We have our new students run through an interactive git tutorial. We find the students learn how to use git quicker and with less gripes by using an interactive tutorial. They have also started learning how subsystems and commands interact within WPIlib.
A new thing that we are doing on programming following similar to design notebook for CAD is a programming notebook/working document. This document will attempt to record and collect all of the features and decisions made whilst programing our robot throughout the season.
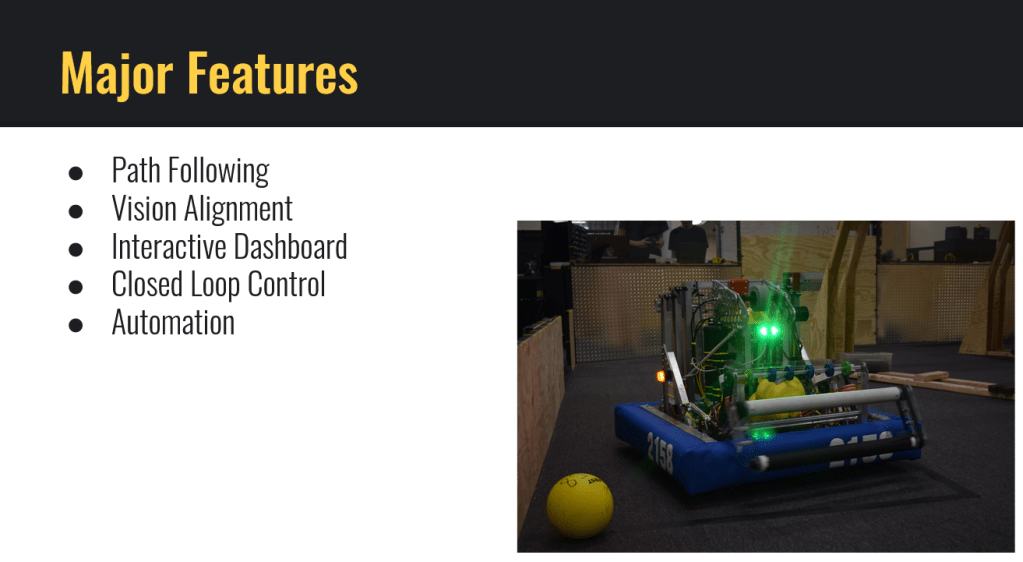
This document exists for the 2022 robot, so we don’t have all of the information yet. But we have a general idea of the features that we will need. We’ll probably need to move quickly and accurately during autonomous so that means we will need path generation and path following features. There will also probably be a vision target on the playing field and judging on the past years game it will be incredibly helpful to use.

Above is the entry for vision feature, it attempts to list all of the requirements that the feature should meet. Hopefully someone will be able to reference this page and work to implement the feature. Our returning members are working on refining this document and will continue to refine it during the season.
MANUFACTURING
Manufacturing has been working on learning the lathe and mill. They have also started working on parts for the CANDrive. Its unlikely that we will complete this before winter break as we only have a week of working meetings.
The purchase order has been approved so we can hire the electrician to run the 480v to the fiber laser. Its one step closer to being working. I’m not sure how much effort it will be to get it into a working state. The sample part that was included with it has incredible detail so I’m hoping we’ll be able to replicate it.
BUSINESS
Business has started working on their deliverables for the 2022 season. Students have started working on the chairman’s essay. They are starting by organizing our past outreach activities and collecting evidence. We are also working on restarting a few of our outreach activities that were paused because of COVID. The team has finished our fall chocolate sales, and our first night of the robots. We have some plans in the works to expand night of the robots.

Leave a comment