
Our first(maybe only?) Sunday meeting got off to a slow start at noon. We started the day by polling the group to see if we learned anything new over night, and need to reevaluate our strategy at all. Next we broke out into 4 groups and brain stormed different ways to accomplish the first five items on our priority list. After combining out brainstormed ideas we broke out into department based work.
CAD
A few students started updating our CANDrive(check it out on our website if you want it) to better fit this years game. We are changing to 4″ traction wheels, and changing the size to be 29″ x 30″. We have a few changes we need to finalize before we can do a design review of the drive base.
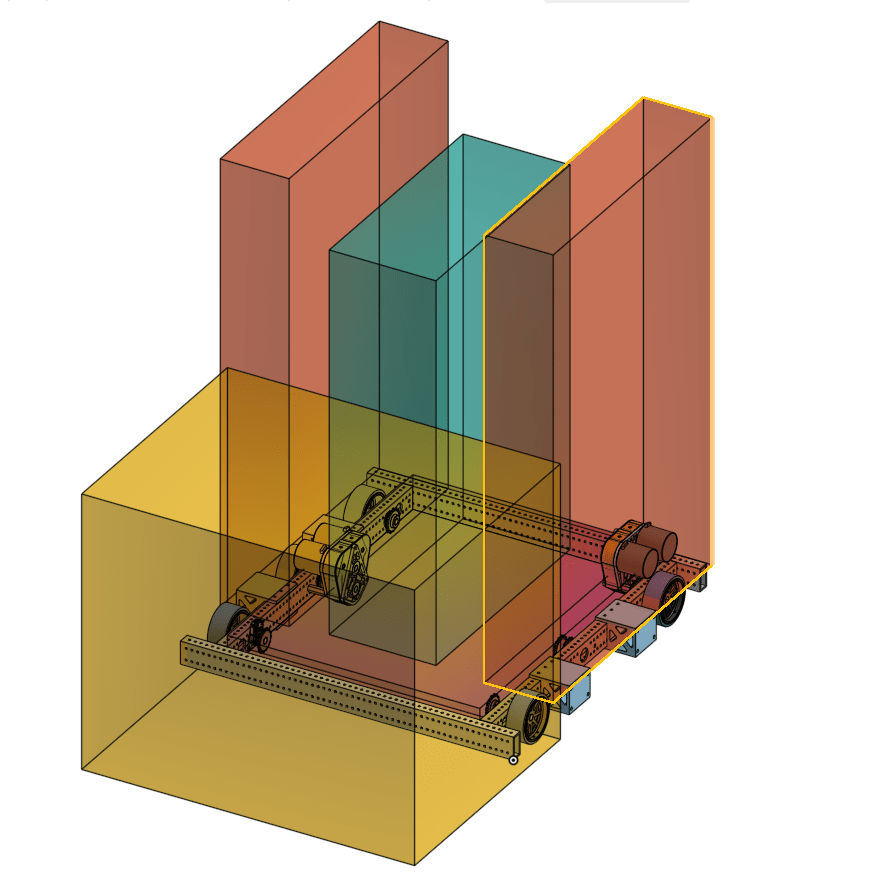
We spent some time narrowing in on ideas that we think will work, and started slicing some space of the robot out for our ideas. We also came up with a few questions that we need to answer from prototyping.
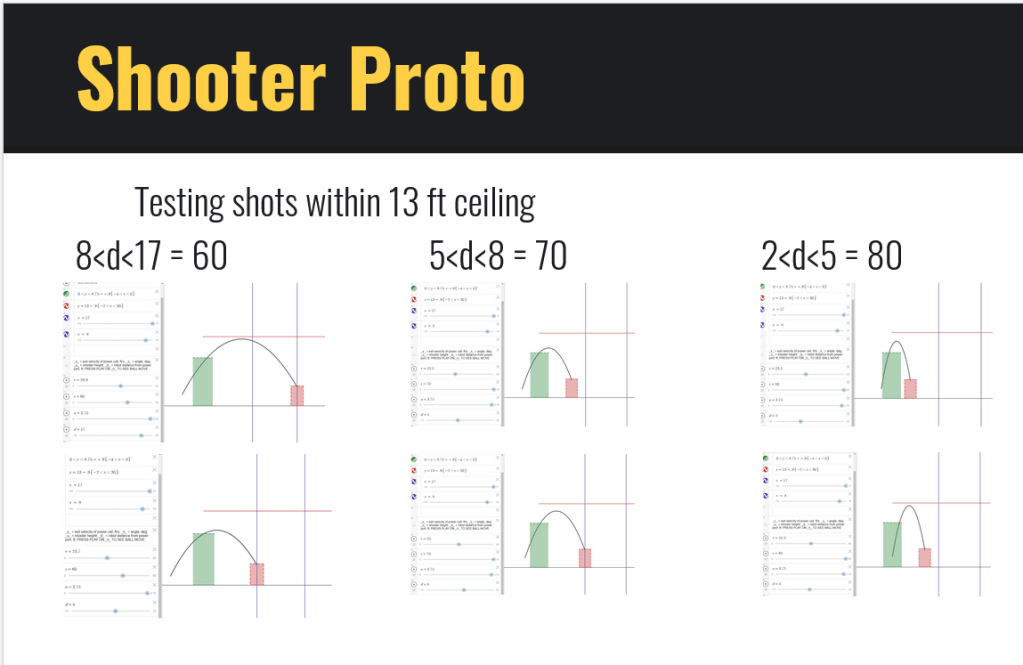
A student created the first shooter prototype, we are testing three compression levels off the bat. This prototype is very similar to one we created in 2020. Its using a 4″ Colson, Neo, 3/4″ plywood and 1/8″ poly carb sheet. This will be cut and ready to assemble for our Tuesday meeting.

We also spent some time looking at different trajectory for the cargo from multiple points in the field. We want to be able to shoot from the protected launch pad and any where less. We could make this work with a two position hood but we run into an issue with our practice area’s ceilings… They exist at 13″ tall. In order to make the shot into the upper hub and not hit the ceiling we have to have a few different release angles. We debated about the pros and cons of this for a while and choice to do a infinitely variable hooded shooter because of our low ceilings, if the shots bounce out or we run into other problems we will change the angles and shoot with more arc. In order to practice and tune the more arc we will have to drag the hub assembly and some carpet to the cafeteria :(.
Programming
Programming started with creating a new robot project for this years game. Some time was spent figuring out which features were needed to satisfy our priority list.

Manufacturing

In manufacturing we setup a power pole assembly line, putting on power poles on all of our new Neos and spark maxes. Field build also started today. We don’t have all of the material for the field yet, should come Monday. Work also continued on a fixture plate setup that will allow us to easily attach and machine plates in the Haas with out removing any vices.

Leave a comment