
Manufacturing
Today students were busy finishing moving the field border to the widest point we can fit. We also had to move the carpet removing some overlap to ensure the field is fully carpeted. The terminal was finished today.
Surface Plate work also mostly finished today. All of the holes were drilled for the grid pattern. We have half the plate with 1/2″ pattern and the other half has 1″ hole pattern. Hopefully we should be able to find a few holes that work for any part. All of the random holes are from this plates past life before we acquired it. We started trying to tap the holes in the Haas but the tap broke on the 19th hole… Instead of breaking a few more taps and getting no where we decided to just hand tap the holes we need when we need them.

Two Students started assembling our second kit bot today. It will be 30″ long by 29″ wide, the same dimensions as our competition robot. The kit of part drive train is simply a joy to use. These two students are rookies on our team, in one day they have finished all of their cuts, and assembled most of the wheels. I predict they’ll have it moving by Saturday, I cant recommend the kit of parts drive train enough, I almost wish we would use it.

CAD
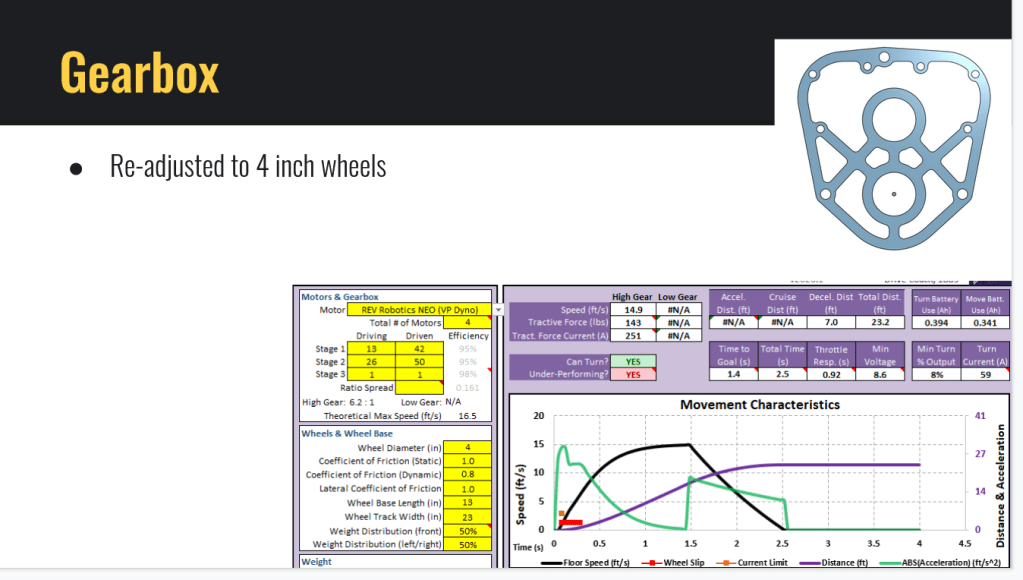
Today didn’t feel like we took any backwards steps so that is a confidence boost. The gearbox and drive base got their finishing tweaks. Our drive base is geared for ~15 fps. A few extra holes on the drive base were removed. We are no longer planning on being able to swap the positions of our gearbox at all, so those holes were removed. We also now only need 1 spot to mount the external Rev through bore encoder so a few more holes removed. The gearbox finished getting the tweaks required in order to mount it to the 1/2″ hole pattern on the surface plate.

We did our first design review of the season, starting with the drive base and gearbox. Nothing major was found, however every little problem prevented now will make assembly and maintenance so much easier.

The prototype shooter was assembled today, they used the wrong sized belts so we put a janky spacer to tension the belt. We used the Rev Robotics tool to control the output of the motor. The tool works okayish. It wouldn’t let me enter a P value of anything less than .1 so we just used open loop percentage based control for now. We made a whole 1 shot before the janky belt tension-er melted.

The intake prototype was cut on the router and will be assembled and tested tomorrow.

Leave a comment