
Oh hey its day 11… checks the schedule… Yup we are behind! I think the biggest set back was Saturdays miss of a meeting. I’ll be talking with a few mentors and rearranging volunteer schedules so that we can still make progress on Saturday and hopefully get a robot built this year.
CAD
Today was a busy day for CAD. The drive base was finally fully pushed out to manufacturing we missed a few shafts on Saturday.
The intake and cargo delivery system prototypes got iterated on today. We had a list of changes to make to improve the intake.
- Fix the belt spacing 😦
- Increase compression against bumper and first roller
- Have three rollers to prevent dead zones
- Add a roller as a 4th roller that will probably not be part of the cds/hopper that deploys.
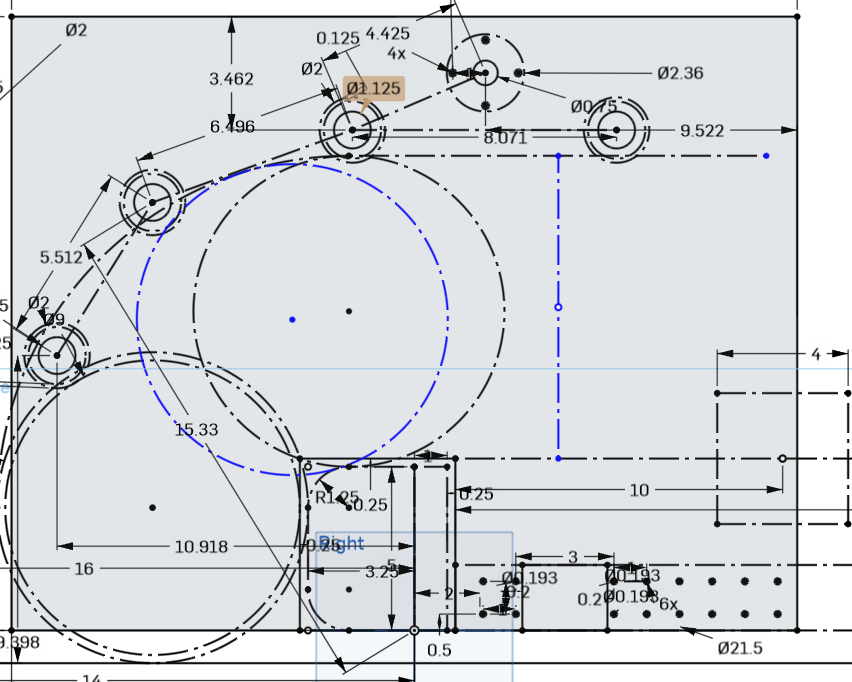
The intake and four rollers geometry is shown above. There is a lot of odd dimensions and the sketch is cluttered but it should hopefully represent the intake system and how it interacts with the bumpers, drive rail, and the cargo delivery subsystem(CDS). The CDS was iterated on today also, we merged the CDS into the intake scope. We did this so we are prototyping the entire path the cargo will take throughout out robot. The hope is to iterate quicker and cheaper at the start by creating these finer detailed prototypes.



We also had a quick chance to test the V1 intake prototype with the blue compliant wheels. These wheels are a bit more stiff and seem to intake the cargo faster.
Programming
Today I had a chance to speak with programming about what the robot is starting to look like. The drive base will have four Neos, and two external encoders. The Intake sub system is spring deployed by running the intake during autonomous. The Intake has one Neo. The CDS has probably three motors(?) to move the cargo through out the robot. One wheel is used to stop the cargo before entering the shooter. The shooter has two to three Neos and a linear actuator that will be used to control the hood’s angle. The climber will have 2 Neos, have a spring deployed hook, and a rope and winch. An important thing missing from this years robot is pneumatic components! By choosing to leave off pneumatics some things become a bit more complicated(deploying the intake) but we save a lot of weight.

Manufacturing
Manufacturing today got started making the drive rails, the 2 x 1 stock was cut and milled to size. It needs a few hours in the CNC Haas before it becomes a useful drive rail. The kit bot team got the gear boxes greased and assembled today! Only a few steps left before they will have a driving robot! Manufacturing got the blanks cut for the gear box plates, and started cutting them on the Haas. A few mistakes later and lessons were learned… Progress happens slowly sometimes. The upper hub is almost complete the poly carb as been cut, hopefully the rest of the hub will take shape tomorrow!





Leave a comment