
Today was a very busy day. Unlike last Saturday we had almost everyone on the team show up, and to top it off I think every one was busy for the entire time! Now we just need to keep the momentum going into next week.
Programming
We had an interesting problem in programming today, we didn’t have enough test beds and driver stations for the whole department to be working at once. The students were trying to test their code today and were bottle necked by the sharing of robots to test their code on. I’m not sure what caused the jump in number of students trying to test their code, the past week has been quiet from programming.
In order to bring another another robot into working order we started working on an electronics panel for the kit bot that manufacturing has been assembling. I heard the shooter spin up to speed today, so that is one subsystem with PID that is at a half working state. I also saw the intake and .5 of the CDS spinning. Progress is being made!

Manufacturing
Manufacturing today was busy with field build, the HUB had the upper polycarb ring assembled. The hub is still missing the polycarb funnel, and vision tape. Manufacturing also helped out in the shop raising all of our lights and removing obstacles on the ceiling.
The kit bot got its finishing touches today, the bearings where flipped and the final wheels were attached. A battery holder was the last thing to get added to our new little kit bot. Soon it will be helping our programming team test, or playing defense against our bot during practice.

Some students also helped out replacing the main board on our Ender 3. There was nothing wrong with the main board on it, but a mentor had a spare so we upgraded. While they were doing this they added a secondary z axis stepper and lead screw. The Ender 3 is a great printer, I have one at home and have ran countless rolls of filament through it. I’ve done zero upgrades to it, and have only had a few minor problems that were easy to fix. Its a great little printer that makes 3D printing fun. Unlike the axiom airwolf or what ever we spent months trying to fix back in 2019.

CAD
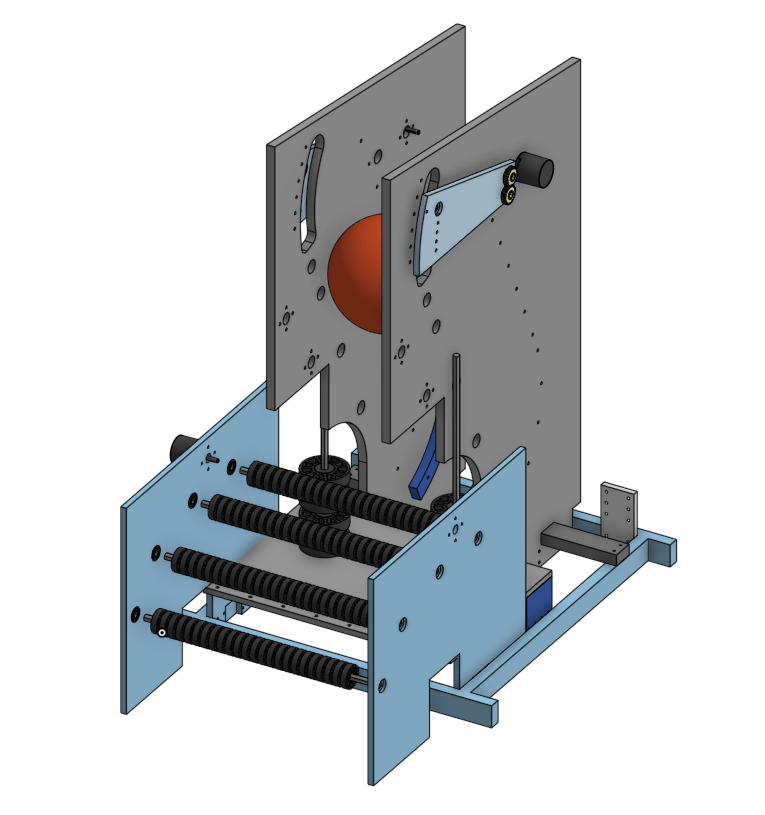
The CDS and shooter combined prototype got its finishing touches today, the belt sizes were tweaked, and the mounting points to the drive base were improved. Not included in the CAD are two pieces of 2×4 which will attach to the lower right bracket and back up to the main CDS and shooter plate to give it some much needed rigidity. The hood on the shooter has some preset holes which will allow us to set the angle we are shooting at. The hood also has a bearing hole and bearing for gears to allow us to test a kicker roller on the back of the shooter to cancel out some back spin if needed.
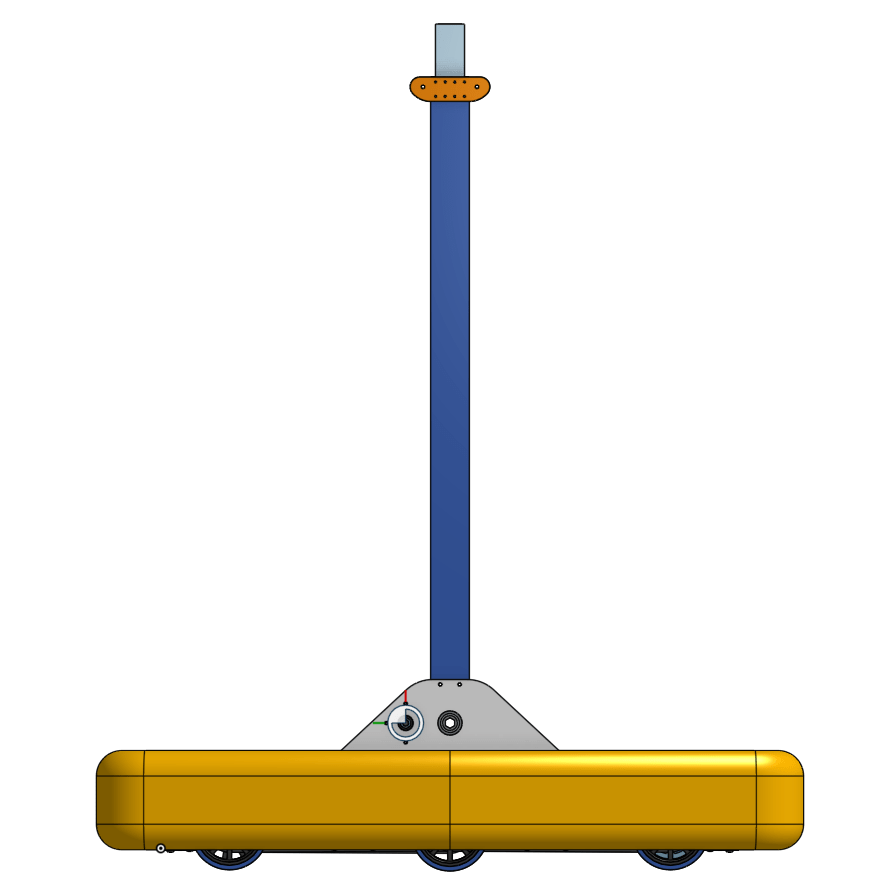
The mid rung climber started appearing in CAD over the past two days. Its not complete yet but its starting to take shape. This climber should hopefully be up gradable to a high and traversal climb as the season goes on. Its a 1.5″ square box tube nested inside a 2″ square box tube, its powered out by a constant force spring and retracted down with dyneema rope, by a winch.
A non prototype version of the intake was also started to be worked on. The non prototype intake needs to be able to start inside our frame perimeter and be able to be deployed outside our bumpers. We plan on doing this with a four bar mechanism that is deployed by gas shocks.
Timeline
At the beginning of the season we set out with a goal to try and have CAD complete of the first version of the robot by the end of week 3. I can safely say that is unlikely to happen, we are a bit behind, but at the same time maybe not behind? This week we should have our high quality prototype bot up and running, if all goes well that robot should be able to play Rapid React well. With a wooden robot to practice with our drivers will start being able to learn how to play the game. So I don’t feel like we are too far behind schedule? It is odd, this is the first year we will be making a high fidelity prototype so its a new timeline for us.
We’ll still be able use the wooden bot to iterate quickly if we discover a major flaw with one of our mechanisms. One thing that is missing from the wooden bot is a climber. I feel like that’s an okay trade off. During a match you will only be climbing once so you don’t need as much practice. I also feel its a bit easier to learn how to climb vs learning how to cycle quickly.
I will be pushing the CAD team to get a version one of the CAD done by the end of week four. At this point it seems doable, but we will have to be productive during meetings and can’t get stalled out on tasks. Next week manufacturing will start running out of things to work on and all eyes will be on CAD waiting for them to get it done. The pressure will be on.

Leave a comment