
CAD
We set a deadline of having CAD complete version one by the end of week four. Our wooden prototype parts did not get cut on the router before the meeting so that set us behind. We weren’t able to assemble any of the prototypes. Not great, it doesn’t help our schedule. Sometimes tasks just get a bit stalled due to resources not being there.
On the plus side we have the shooter pieces and can start assembly tomorrow. That is a much better way to look at it. Our intake V3 will be cut for tomorrow hopefully. Full wooden robot will hopefully begin to take shape. Oh and the side plates for the shooter and cargo delivery system are absolutely massive, and really heavy cause we cut it out of MDF.

The bounding boxes were updated a bit more to show where each subsystem is going to exist inside the robot. Yellow is the intake and cyan is for the shooter, and cargo delivery system.
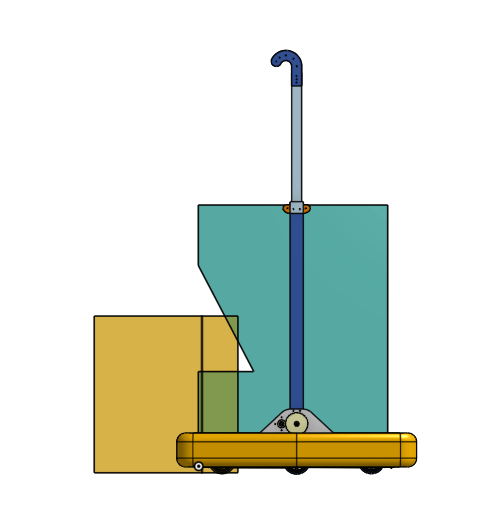
Our robot this year is going to look some what similar to your 2020 robot, with a metal hooded shooter and the structure supported with 1 x 1 and poly carbonate siding. Hopefully it will be a good looking robot.
The intake further progressed today, its looking like it might be finished by Thursday. One thing that is missing is the gas shock to deploy the intake, another thing missing is the shafts that will make up the majority of the intake, but those are easy and quick to make. Also Frog.

Manufacturing
Field build continued for another day. We shouldn’t have built the terminal. We said we weren’t going to build all the field before the season started. We said we would think about which pieces to build. But then a few people get the field element list and well now we have a terminal.
The drive base got bearings put into the rails today. The students started to take apart the rails because they didn’t think we could press them in when it was assembled. To be fair it would have been easier to do when it was apart, but I make mistakes sometimes too. After the students took apart one rail I showed them a 2 x 2 piece of aluminum they could use in the arbor press to press all the bearings in on the assembled drive bases.

Some rework was done today, there was some confusion on the drive base shafts. They weren’t tapped on both sides(the drawing doesn’t specify both sides). We also didn’t have the correct number of shafts for 1.5 robots.
Programming
Today was filled with testing from programming. The students tested PID control on the shooter, we can set set points and tweak PID constant values. We shot a ball directly into the ceiling at 4700 rpm, and two feet forward at 3000 rpm. Some tweaking is required to find the right values, a tomorrow problem. The CDS and Intake subsystem was also tested today from code POV. They have a few refinements to make but we are getting closer!
One thing that is a bit odd is when Neo’s brown out condition it makes an odd noise and some what runs. Its funny when programming students come and get me and say there is suddenly a mechanical problem with the robot. Uh well no, the robot hasn’t really changed, most likely its a problem with their code, or the battery needs to be changed. They are sometimes a little to quick to pass the blame for something not working.

Leave a comment