
CAD
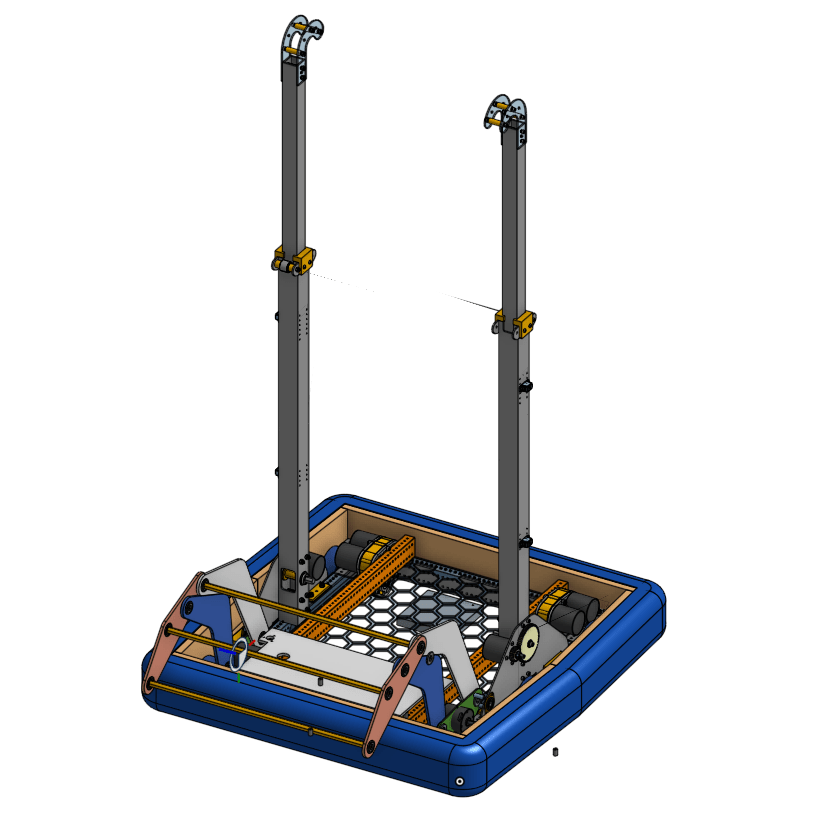
Progress is being made on the intake and climber. I think the climber is mostly done for now until we add a high plus traversal mechanism. The intake got shifted to the inside rail and work continues refining it. There are a few small low hanging improvements that need to get made then it should be good enough to make for real. After they figure out how to deploy it that is. The plan so far is gas shocks but they are having trouble finding a good mounting spot. The first half of the CDS is starting to get made, the bottom pan which contains the two vertical wheels to center the cargo. The CDS and shooter are getting pushed as front as we can to save space for climbing mechanisms. CAD has a lot of work to do and only a week to get it done.
Manufacturing
The field build team almost finished the hanger today! I was caught up in assembly hell with the wood bot, so I didn’t manage to grab a picture of the hangar before leaving. I think all that is missing is the 4 sets of pipe.
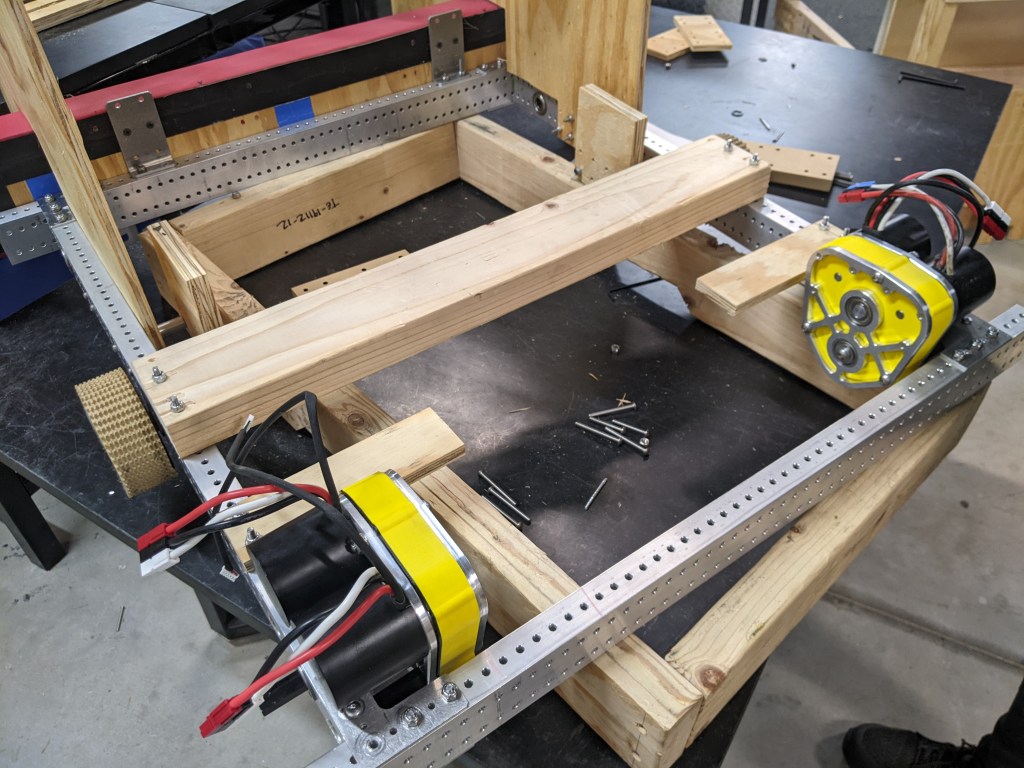
The wooden bot assembly is not going nearly as smooth as I had hoped. It feels like the CAD team who dreamed it up left one too many items to figure out during assembly. This slows everything down. We are also assembling it on top of our drive base for the season which also makes things move slowly. We also made a fatal error on Tuesday.

If you look back at the image from Tuesday(above), the frame assembled closet to the camera. You see the back right bearing and how there are no clearance holes there? That rail was attached in the wrong orientation.
This was a painful discovery, because we figured it when we were trying to get the gearboxes attached to the prototype bot. We had to remove everything from the left rail, flip it around and reattach everything. It took the first half of the meeting to fix the mistake. Big sigh, lesson to learn, double check things are done correct before moving onto the next step. Maybe we can work this into our process some how. Our process for assembly is lack luster at the moment and has a lot of room for improvement.

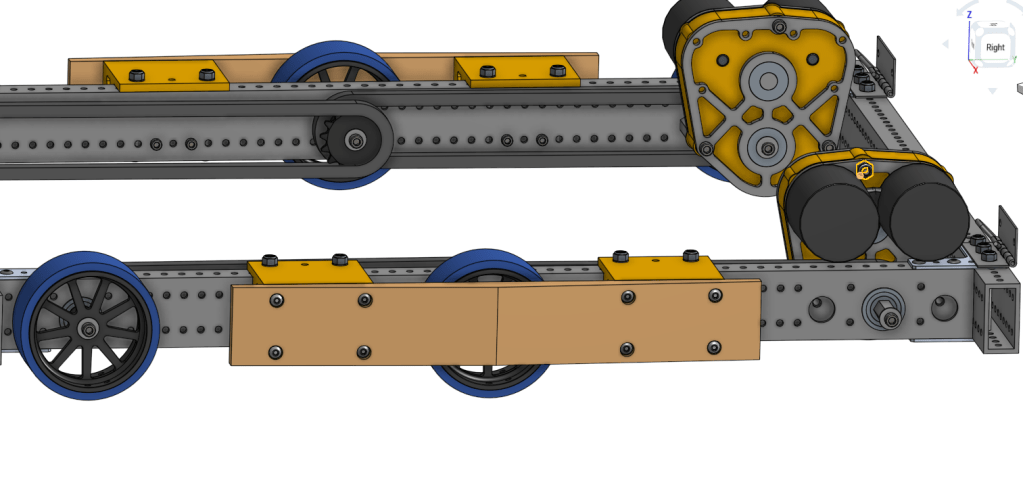
We ended up making a little bit of progress before the night was over. We got the two drive gearboxes attached and the middle two wheels also went on.
In order to have a running bot on Saturday the following things need to happen
- Make 4 runs of chain for the drive base
- Attach the chain runs
- Attach the front and rear wheels
- Make 2 x 4 bracing to hold the heavy CDS
- Make bottom J support spacer CDS
- Make top j support spacer CDS
- Make Wood Support CDS
- Make Wood Block CDS
- Make 2 9.75 2 x 4 spacers for CDS
- Attach bracing to CDS
- Mount first half of CDS
- Cut CDS poly carbonate backing
- Mount S Bend to CDS
- Mount poly carbonate backing to CDS
- Assemble CDS rollers
- Assemble Hooded shooter
- Finish Electronics Board
- Find a temporary battery mounting solution
- Throw some code at it
Uh you know, a lot of stuff to do in order to get it running and I thought we could have it done yesterday. Oh how wrong I was. Maybe by the end of Saturday.
Programming
I should probably spend a bit more time checking in on programming, but they seem to be making good progress on their own for now. We picked up two new mentors for programming this year and its has allowed me to be less involved in programming. This is nice as it allows me to better adapt to other groups needs. We could realistically add another mentor to manufacturing, CAD, and two to business.

Leave a comment