
Its the end of week three. Uh thats kind of scary. If bag day was a thing we would be half way to it already. I just checked my anxiety inducing first event count down, and it says we have 46 days until our first event. I’m not sure why I created that count down, I don’t like it and I don’t like looking at it. I mean I suppose its a good thing to keep track of but still.
CAD
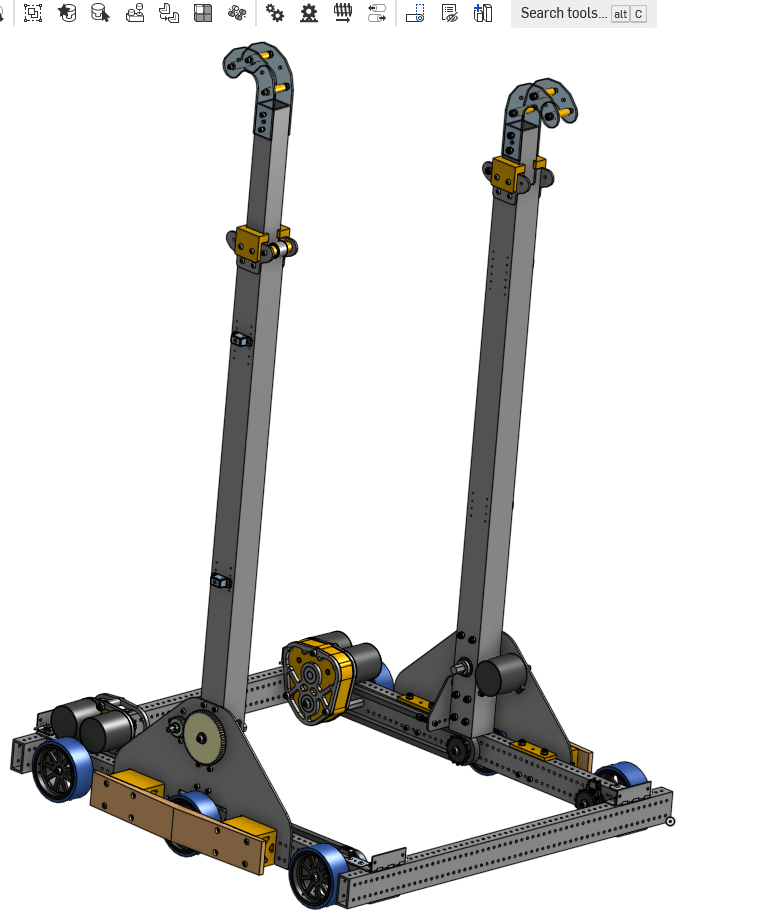
Today we did another design review, this time for the climber sub system. Our first climber iteration will only do the middle rung and the lower run. Our climber is super simple, a telescoping tube extended by a constant force spring and pulled back in with a winch. Ignore the backwards hook, lazy mirroring on the assembly. Each climber can lift the robot by itself, the two sides are not mechanically linked at all.
The design review went well we found a few items to investigate/fix.
- Secondary Support Plate
- Replace shaft lock with the heavy version
- Verify limit switching mounting position/Fix if not good
- Confirm top plate’s hole align to a 1/2″ hole pattern for machining
Overall nothing major found during design review. A few things to fix, but it shouldn’t take too long for CAD to make the changes. Hopefully they can get the part drawings out by the end of Tuesday.
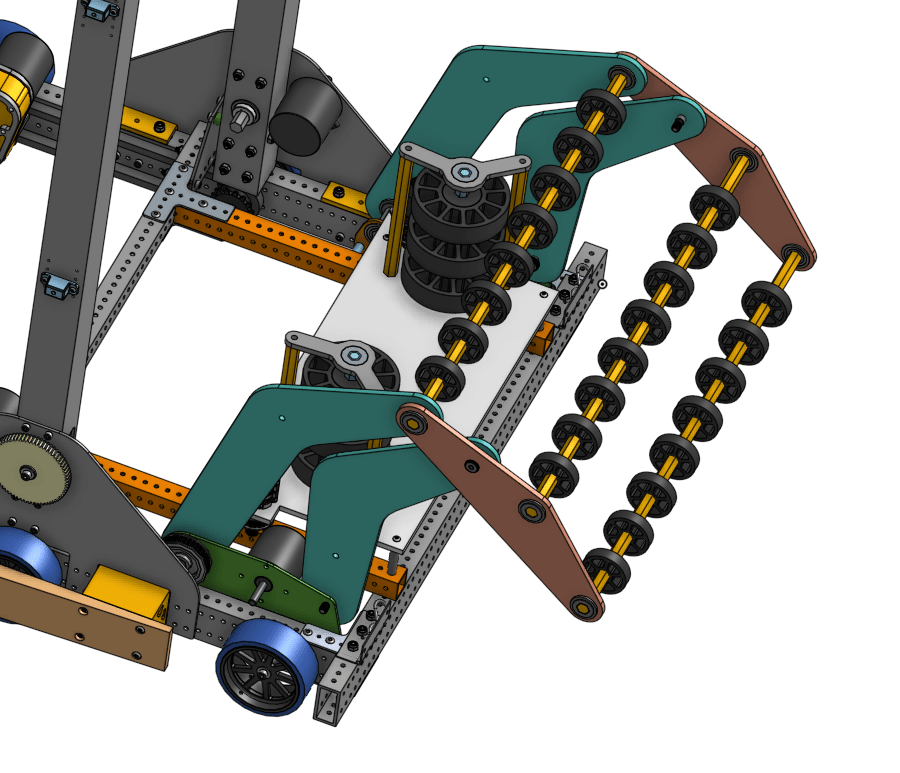
The team was also working on the CDS/Intake. On the intake we decided to ditch the gas shocks for now and use surgical tubing as the spring force. They also added shoulder bolts on two of the non powered rotating joints on the intake’s four bar. The CDS subsystem got the first half of it made, the vertical rollers.
Manufacturing
Today was a busy day for manufacturing. We knocked out most of the items on the list from Thursday and got a lot of the build done for the hangar. The hangar is only missing the iron pipes at the moment.

For the first half hour or so the manufacturing team split out and started making all of the wooden parts needed for the rest of the wooden prototype bot. Then I taught a few students how to break chain, and they got to making the 8 runs of chain needed for the two robots.
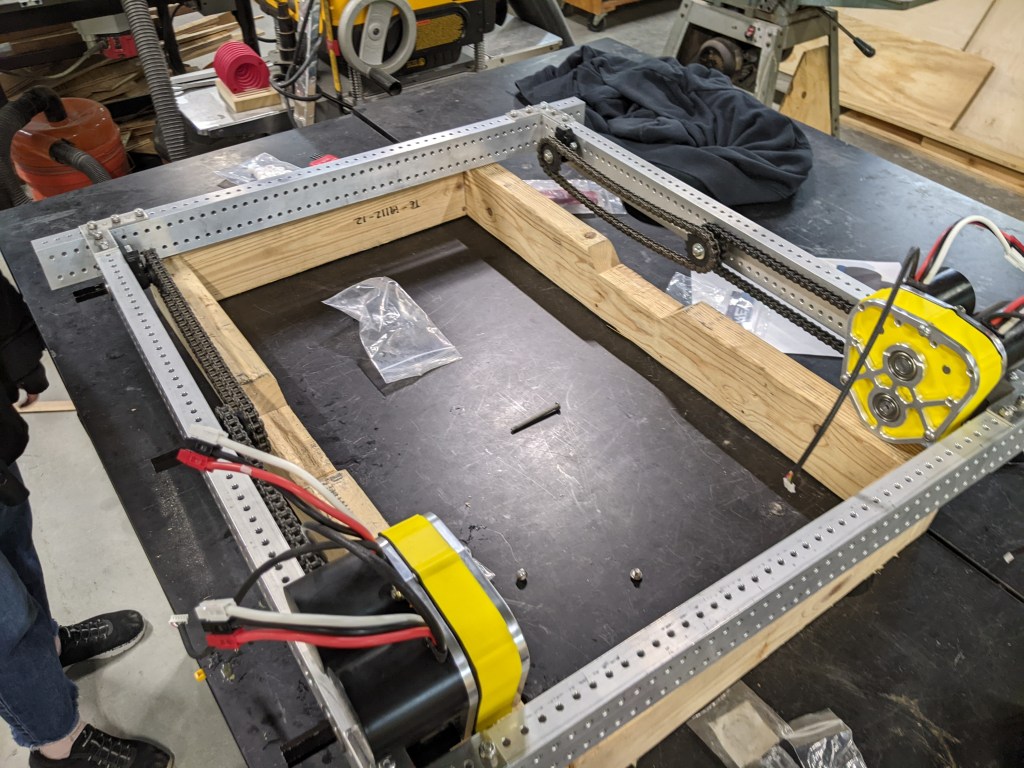
Towards midday we had most of the support structure done on the wooden robot. The two wooden diaganol braces work out really well. The structure is very solid and moving the top plate moves the whole robot. I’m very impressed for this little wooden robot.

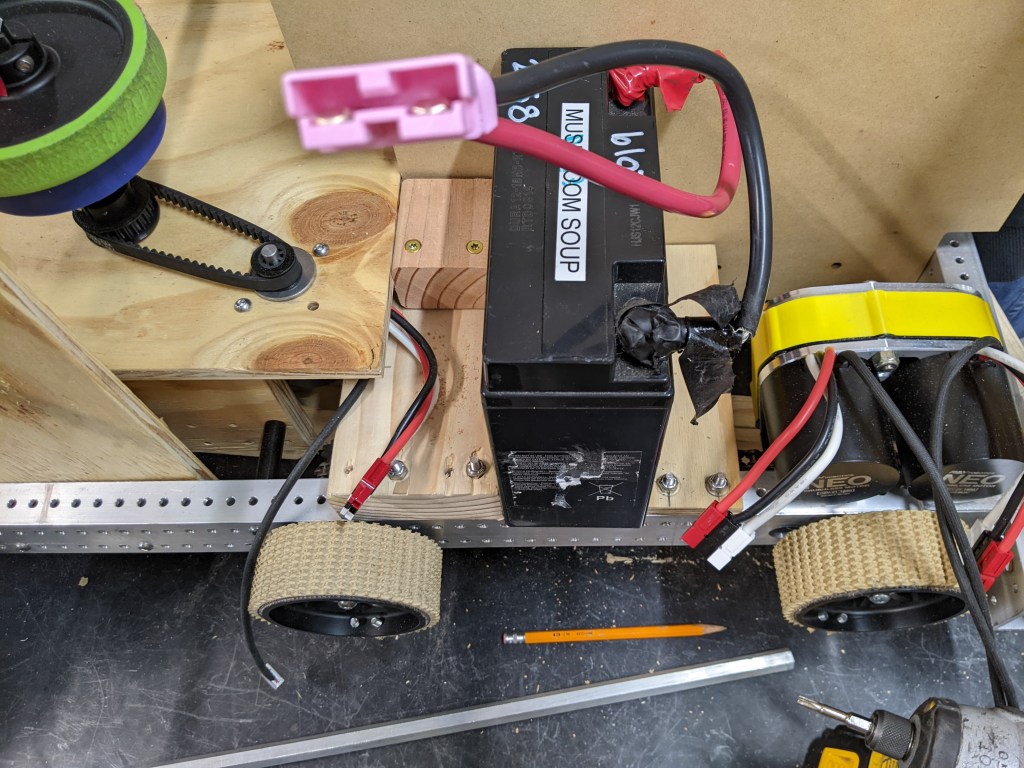
The shafts/ belts and wheels started to get put on the robot. I found a neat spot to mount the battery temporary, it is so nice, its like it was designed to be there(It wasn’t). The chain was attached to the middle wheels on the wooden bot. Two more gearboxes where assembled after the 13T pinions came in. These gear boxes where then put on the real robot and then the chain runs were added to the real robot.

At the end of the day we managed to get the list down to the following items. Five items left, not bad. I was again too optimistic for thinking we would have the wooden robot moving and playing today. We still have to assemble the CDS rollers, hooded shooter and make an electronics panel.

We also noticed a problem at the end of the day. There is no compression between the top roller in the CDS and the cargo. The ball might continue up the path untill it makes contact with the roller from the momentum of the two horizontal rollers. Confused we went home, after making a quick dinner I took a look at onshape to see if I could figure out what the problem was. It took a good bit of looking, and adding a few drawings to see where the missing compression went. In the end its a stupid mistake.

The red circles indicate where each prototype put the drive rails. When we mounted it to the robot they were both now at the same level, and that’s where our missing compression went. The big CDS plate has 2 extra inches of material on the bottom that we need to cut off to fix compression. In order to fix this we need to remove the J braces, unscrew all of the wooden support braces, cut off two inches, and make the clearance cut outs. It will probably take use half or more of Tuesday to fix this issue.
Programming
I saw some activity with the kit bot, one student was working on getting path following to work. The other student was working on getting the lime light to align to the vision targets one the field. I should check in a bit more and participate in some of their code reviews to make sure they are staying on a good path.

Leave a comment