
We hosted an FLL tournament today so attendance was a little bit light early in the morning as most of our students were helping out with that. After the tournament was up and running we swapped some people around and managed to get a good crew of students making progress.
CAD
The final few findings from the design review of the intake were completed. The intake will get another round of design review and once that is completed we will be at 3/5 subsystems done. The CDS upper half is nearing completion, the motors to power the belt path and the cargo blocking wheel got mounted. Pullies, shafts and wheels were added to the assembly. Some aluminum 1 x 1 was added to the back of the CDS for support and a fancy eye bolt and rod setup was also added for support. The shooter and the electronics panel/brain pan are the two big remaining items that we need to finish. If we get everything done, and assembly is going well we might be able to add a traversal climb to the robot. A pretty big might. I’d put money on that happening after our first competition not before.

Manufacturing
Students worked to hang up bumper storage hooks today, its a small improvement but having it done finally is a nice feeling. A spot to bumpers that is out of the way is great!

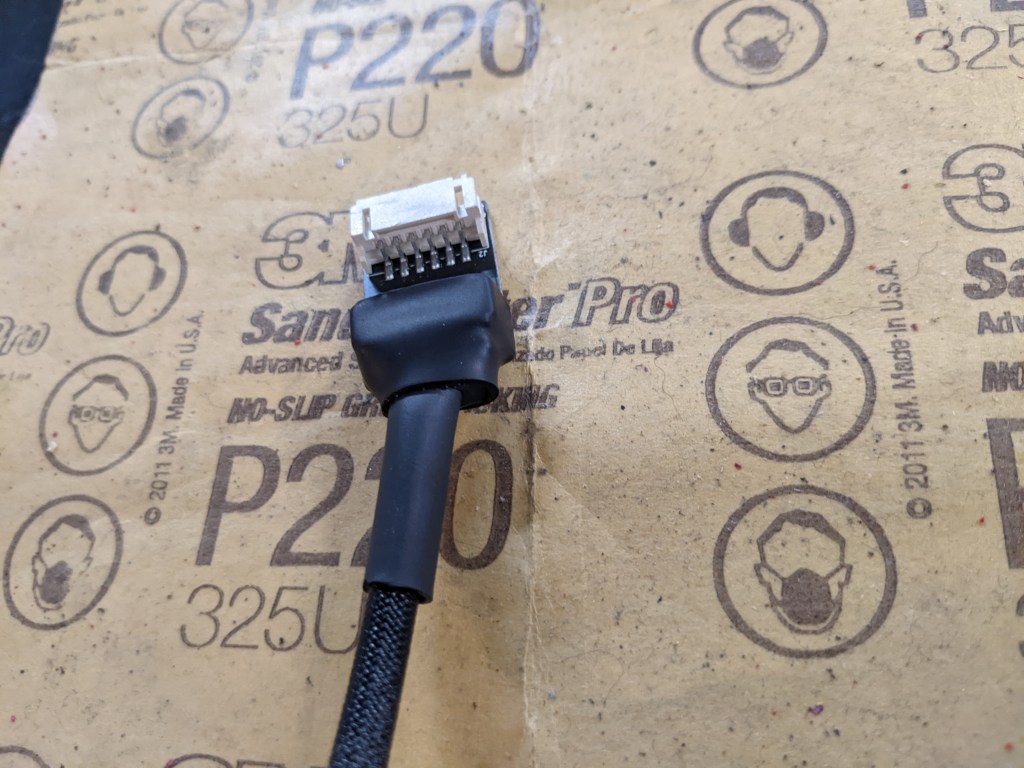
We spent a bit of time fixing some issues we’ve had with the JST 6 pin connector on the Neo motors. The problem with the JST 6 pin connectors is that if you don’t grab all of the cables perfectly every time you will eventually pull apart one or more of the wires. We have tried to re-crimp the cables in the past but never had any hold up after re-crimping.
The solution to the problem might be a bit overkill but we want to prevent any potential problems. First a small piece of heat shrink was applied to the cable, loose enough that it still can move. Next the cable was plugged into a JST 6 pin joiner board, and hot glued in place. Hot glue was placed to secure the cable to the board and the cables to the connector. Then a final layer of heatshrink was applied to the top resulting in a nice and secure looking connector. Now the cable that would be unplugged from the Neo is secured to the board, and if some one breaks a 6 pin JST extender cable we can just grab a new one.

Programming
The wheels started turning today for programming. We started off resuming testing the code from Wednesday when we realized the intake and CDS had a few outstanding bugs and code review findings needing to be addressed. The students who completed the work were not present so we had to reassign a student. We are far enough behind schedule that we can’t afford to wait on things like this, they just need to get done.
After a few hours of debugging and trouble shooting we finally got the MDF bot functional enough that we could put it on the field for some testing. This was right at 5pm when we were supposed to be finishing up the meeting. Needless to say we ended up spending another hour testing it out.
MDF Bot
The MDF bot has some problems, we had managed to find and fix a few as programming was testing their code during the day. The first problem we fixed was stopping the cargo at the top of the CDS before the shooter wheel. Initially we had 2″ wheels and those didn’t have enough resitance to stop the cargo from moving up. We tried spinning the stopper wheels backwards to spin the cargo, that almost worked. The wheels were increased to 3″ wheels and spun backwards that was the sweet spot to fix the issue for now.
While on the field testing we found we could still move the cargo a little past the stopper wheels and the shooter fly wheel would get stalled. This could probably be fix a bit in software by running the stopper wheels in reverse slightly after the CDS path stops to push the cargo back down again. The CDS could also get less compression against the cargo, which wouldn’t be able to over power the stopper wheels then. We should be able to decrease compression by moving the belts around so they touch the cargo at different points in the circle.
After some fine tuning on the benchtop we gathered some students to watch and dragged the robot out to the field. The MDF bot took its first shots. Well we hit the ceiling right away, we slowed down the flywheel and moved the hood. The robot was driven to the fender and we scored for the first time in 2022.
It feels great knowing that we have the game piece transitions some what figured out. The cargo doesn’t get jammed up on each other. We can pass the cargo to the shooter when we want. The CDS has a few tweaks in CAD that differs from the MDF bot. The vertical rollers are closer together, belting for less distance, the shooter is 2″ lower and the vertical roller to overhead roller is closer together. We need to fix a problem we have with cargo escaping, if a cargo is at the belting moving up, and another cargo hits the first one the second one will be ejected from the robot.
Schedule
So 40 days until our first competition, that is not too bad, we can get a lot done in 40 days. We are going to start driver practice soon, programming will have the MDF bot to test and work our bugs on. I gave a hard deadline to get the CAD done by Saturday this week. We are a solid week behind schedule, but at the same time we are beating every year in the past.
We still have a lot to do, finish the CAD, finish manufacturing the subsystems, assembly, and electronics. We are starting up optional Sunday meetings this week. I’m not sure how productive those will be, might just use it as a good time to clean and organize stuff.

Leave a comment