
Saturday’s always seem to start off slowly, we had around 12 students when the meeting “started”. The progress doesn’t stay slow tho, even though we were hosting another Vex competition we still managed to get around 23 students at the meeting. Manufacturing was the department with the most students today, which is good because we have a ton of parts to make.
Currently we are bottle necked by shaft production. We have 6 lathes, however one is currently broken and the other two are missing tooling (or something) so we can only have three students working on the lathes at once. There is a large amount of shafts one the robot, so it;’ll take us a few days to work through all of them.

In addition to lathe parts I set another team member working towards making some 1 x 1 box tube parts for the CDS. These could have been made in the Haas, but the students who know how to use it were missing today. Also didn’t have any more lathes so its good exercise for the student. The part was made out of 1/16″ wall tubing so I stressed the importance of taking it slow, light cuts and not clamping the part so hard it crushes. It went mostly well. The hammer made an unfortunate appearance and a part got scrapped because it was dented. Oh well I think the lesson was learned. We have a three different 1 x 1 parts that need to be made, hopefully they’ll get thrown on the Haas tomorrow and get done quickly.
Assembly of the practice bot has started again. Slowly.. but the bumper support mounts went on the robot. The intake plates where cut on the router today, all in a single go. It was great the router made 4 different parts, 3 pieces up with one setup. Talk about efficiency. We finally nailed in the settings that allow us to cut bearing holes on the router. That should speed things up considerably. Assembly should pick up speed soon, we are working through the shafts, the router is churning out parts, the Haas should be busy tomorrow. It will be a busy week assembling the robot(hopefully).

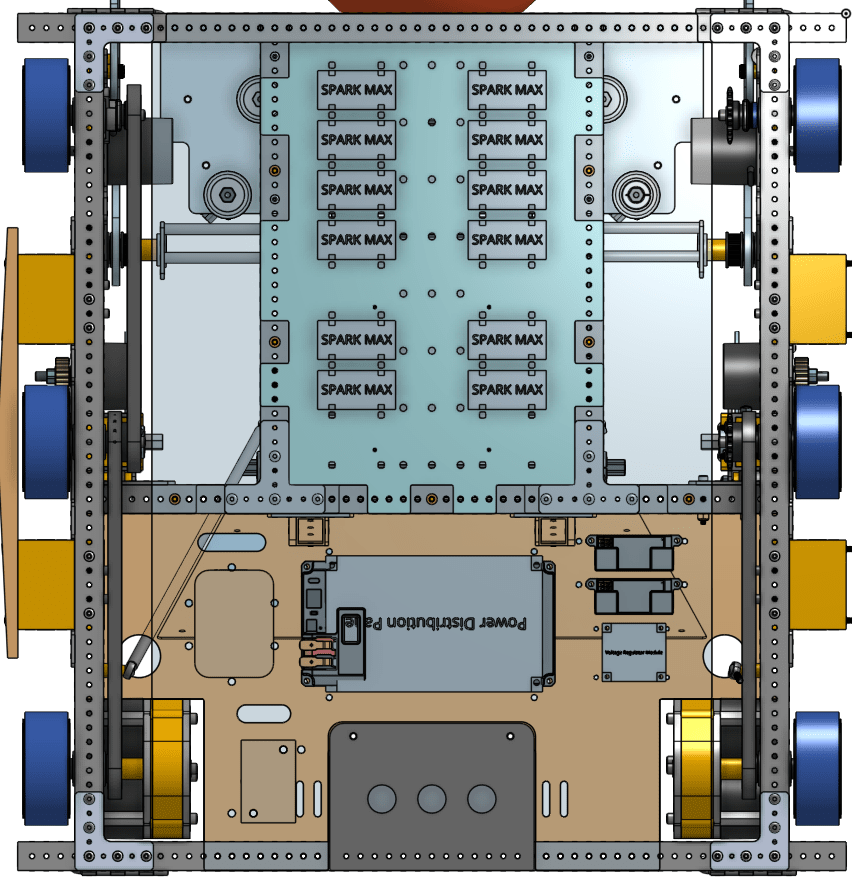
CAD also made great progress today. The brain pan got finished and then designed reviewed. A sponsor panel got made and attached to the back of the robot. The brain pan has 16 spark maxes, leaving us with 4 extra, it has mounting spots for either the Rev PDH or CTRE PDP, mounting for Rev radio power module and a VRM. If needed we can swap out to the old power distribution system with out changing our brain pan out. The first version of our robot is at 100% CAD complete. There are a few tweaks needed to brain pan. We are also working on a variable hood for the shooter, this should be getting done in about a week.

Programming also made so big leaps today, paths were working for the first time this season! Its a huge milestone because after we get paths working autonomous really gets hammered out quickly, its easy to build autonomous modes once you have moving down. The path is a little slow, but that is because we have max velocity and acceleration set low for testing. It could use a bit more tuning so it tracks a better, but we’ll get there.

Here’s the clip from Thursday’s practice where we almost toppled the MDF bot. The real robot should be better balanced, so hopefully we can drive quicker with out worry of toppling over.

Random Mentor Thought
Today I saw a few things that really makes me happy happen on the team. First a few students who hadn’t signed up to help at the Vex competition showed up to help out. Secondly there were multiple instances of students teaching other students how with out prompting. That gives me hope for next year when we try to increase the number of students on the team, the students will be picking up some of the teaching workload.

Leave a comment