
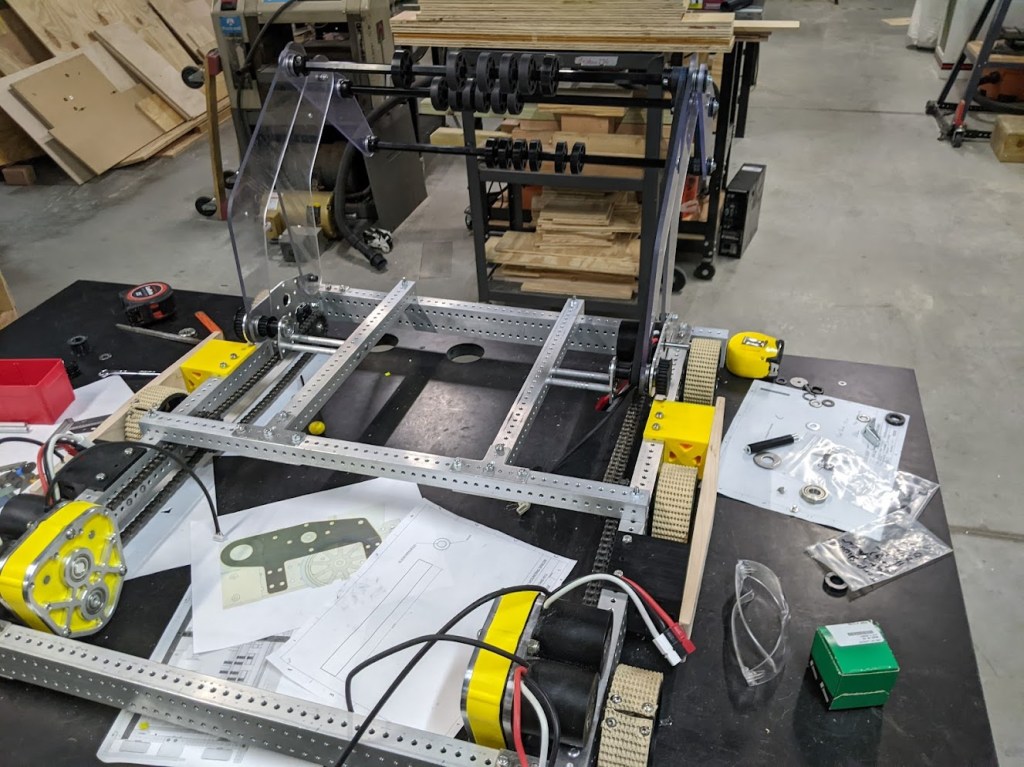
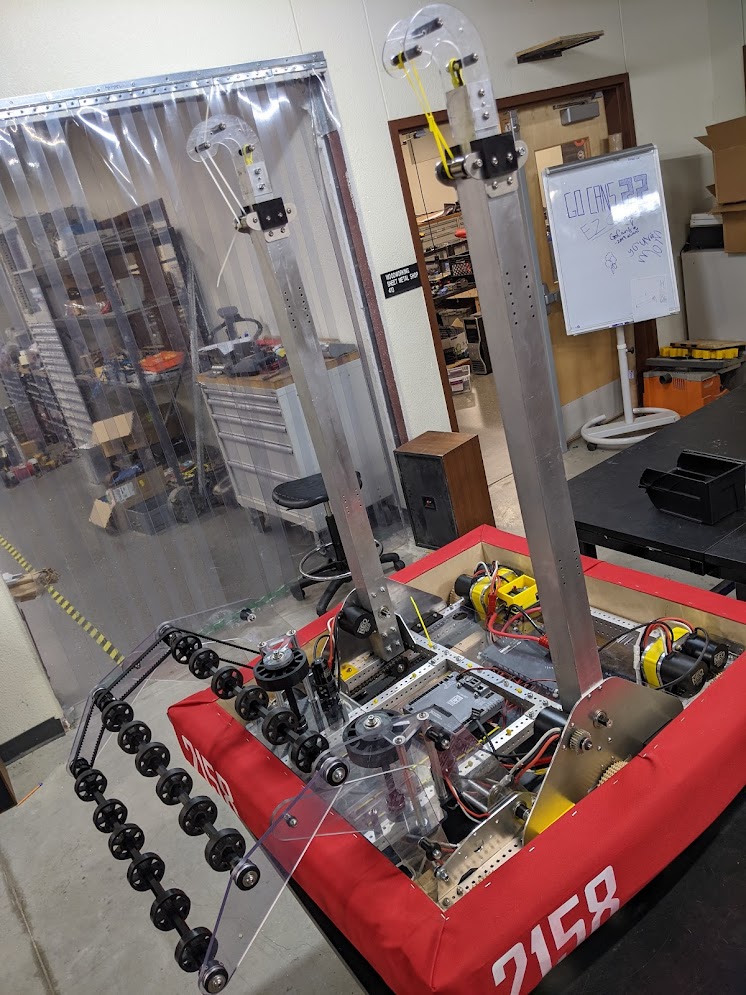
Its starting to look like a robot! Lets just show the picture now and we can talk about all of the progress that was made today. The intake is assembled, the climbers are assembled and mounted and the vertical rollers for the CDS finished assembly but not mounted yet.
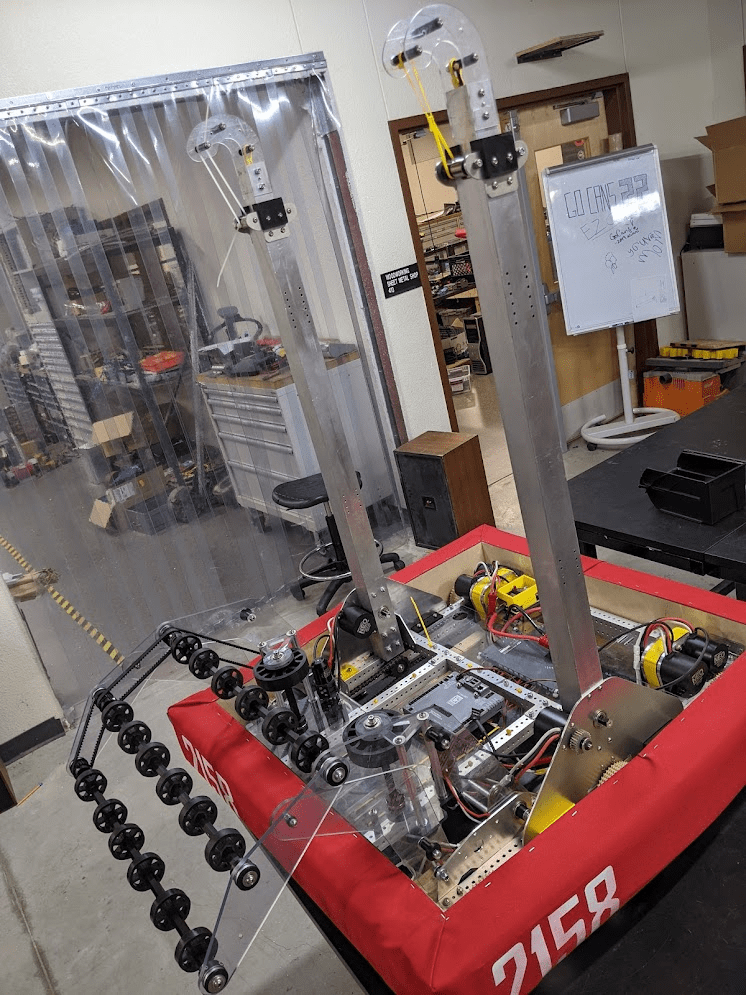
The intake finished assembly today. We found a small problem with it. In order to get it fit inside the frame perimeter when up we had to Dremel a small notch out that was hitting the Intake’s Neo. We missed this interference during design review, might have been because the mates were broken and we couldn’t store it all of the way. If you look really hard you can see the small notch in the below picture. The surgical tubing was attached to the intake and it deploys with a bit of force.
We’ve collected a few improvements for the intake already. The clearance notch for the Neo has been added to Cad already. Then we are going to make the surgical tubing stand offs shorter, , make a 3D printed spacer for the shaft side with out the motor, and finally remove some unused holes that were added in case the plate needed to be cut on the Haas.
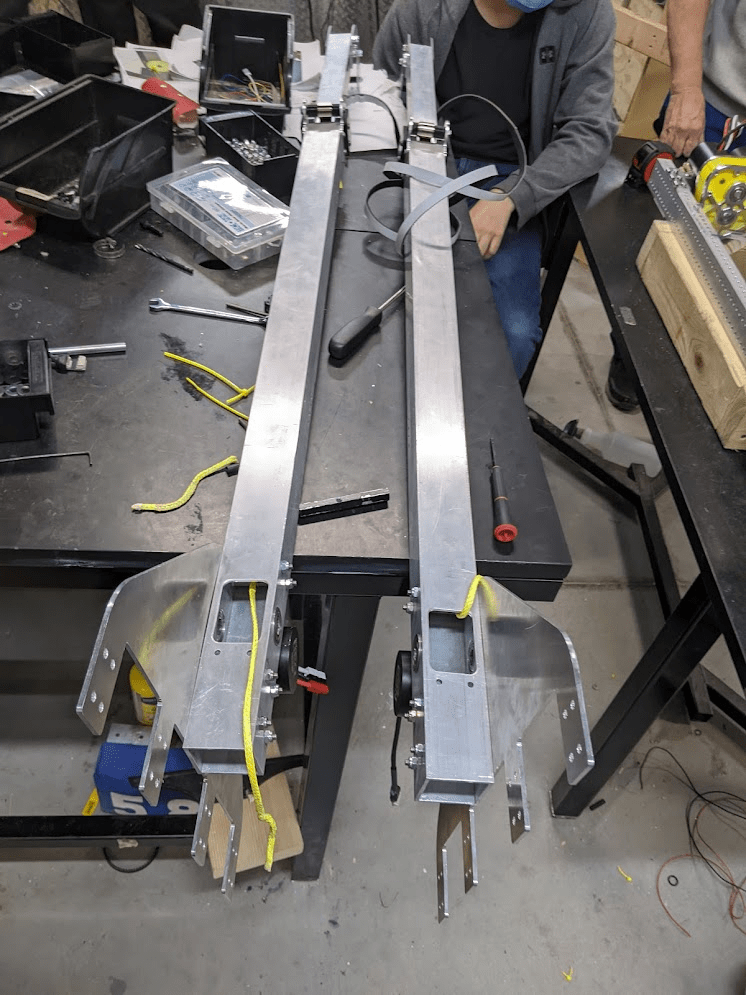
The climber modules were both “finished” on Friday by some students. They required the rope to be shortened so the climber isn’t using the 3D printed slides as a hard stop. One of the slides broke before we fixed the rope length. The shafts also needed to be tapped and a chamfer on the hex shaft so the rope doesn’t get cut. The climber has two improvements we’d make, add a cut out to access the intake shaft retaining screw, and a clearance hole so one of the shaft bearings isn’t pressed into two pieces of metal.
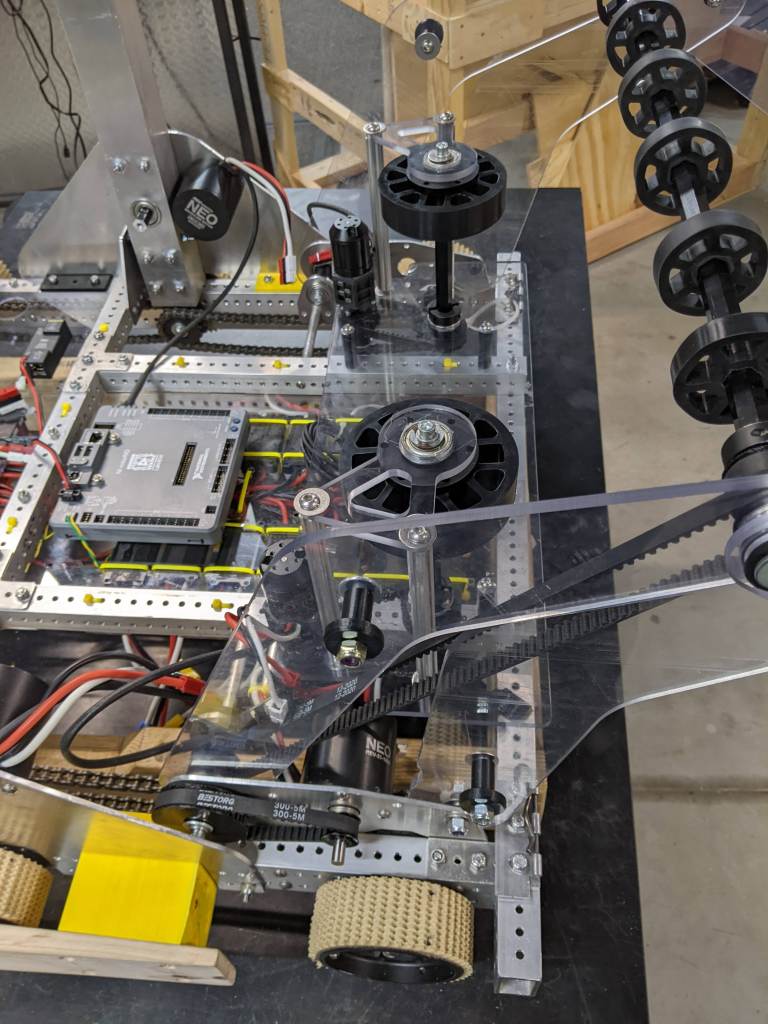
The Cargo Delivery System parts reached critical mass and we could begin assembly. The support 1 x 1’s were attached to each plate then the stand offs were added. We even used a few rivets for it(its a running joke at this point between Cad and I about my dislike of rivets). The vertical rollers of the CDS that act to center the cargo were also assembled. The mounting pattern for the ultra planetary was wrong and had to be hand drilled. We also need to trim the vertical plate so we can reach bumper pins below it.


Programming made a lot of progress today too. At the start of the day we had a discussion about autonomous modes we wanted to be able to run. We ended up with 5 different auto modes, but the fifth mode is only once we have perfected all 4 above it. The main 4 modes are leave tarmac, one cargo fender and leave tarmac, two cargo fender, and three cargo fender. The team also got the first iteration of the color sensor to position the cargo working today. There are a few improvements to be made but its look good already. We ended up having to use an I2C multiplexer to get multiple rev robotics color sensors to work nicely together.

Schedule
Its amazing the amount of visible progress that we have made in a single meeting. Granted its 8 hours vs our normal 2.5 hours. The bigger blocks of time are some of our most productive meetings. Monday is Presidents day, the students have off, and I have it off, we are doing an optional meeting. Hopefully we can get enough students to show up that we can finish assembly of the robot. With the assembly nearing completion the end is near for MDF bot, it has served us well but it turns poorly and the intake is a bit too wide with extra shaft length.

Leave a comment