
Bonus day! The students have no school today so we managed to sneak in a very productive extra meeting. We only had 6 students show up(not all at once either) but it was a very productive day. The students filtered in slowly, 9:00am is way too early of a start for most of them. Eventually we had enough people working towards the same goal(getting the robot finished) that we started making visible progress.
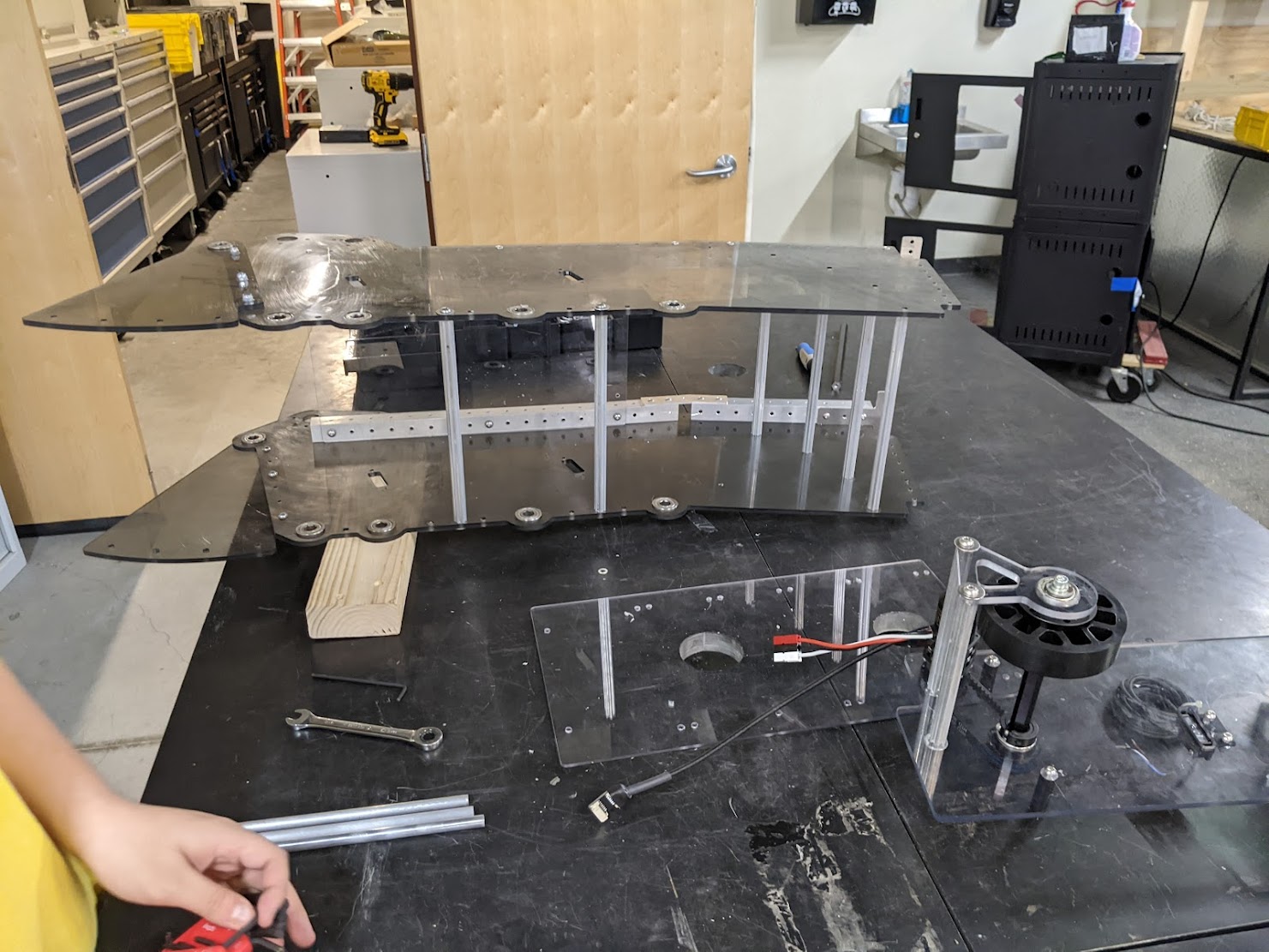
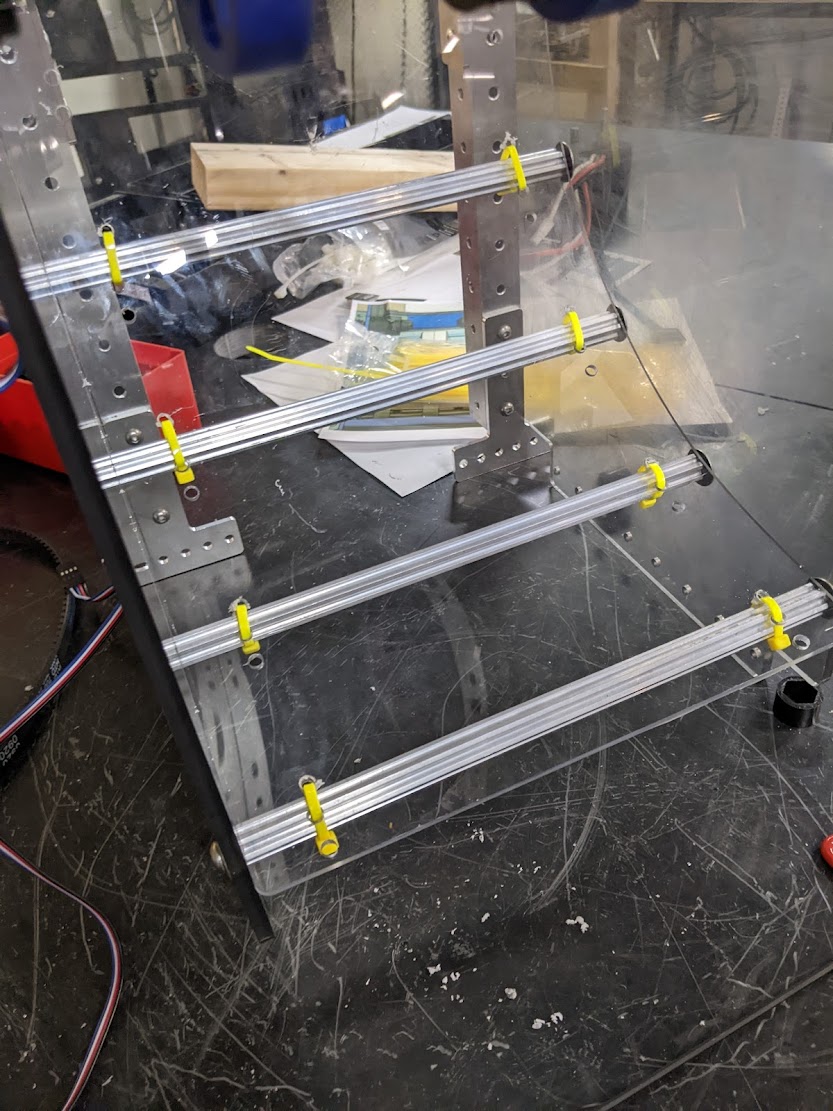
The CDS and shooter assembly went pretty smoothing, only a few slight hiccups. The biggest problem we had was the zip tie holes in curved poly carbonate piece were off by half an inch. I think the person who made the holes put the top hole in the right spot then put the next hole below that which was incorrect. Another problem that lasted a few minutes was the color sensor was hitting one of the belts. This lasted until we swapped the sides of the color sensor to the other side. The stopper wheel and the belt path both use the same motor mount and both use the same belt. So we just switched the sides and the problem disappeared. Assembly went surprisingly smooth!



The electronics got a lot of attention today. We made JST extensions for all of the motor encoder connections. Then we took the time to label each motor, each end of each cable, all the labels match the CAN Id of the spark max.

The MDF bot got disassembled through out the day. We needed the shaft locks mainly from it. It also had all of our remaining hex shaft stock on the intake. Its electronics are also needed for the second robot. I took some decent photos of it before we disassembled it. It was incredibly useful for programming, driver practice, and proving that our CAD works. We iterated quickly on the intake and vertical rollers of the CDS. The rest of the CDS we found a few problems and fixed them in the second version which was the first real version. Programming made the most use of the MDF bot, they have the majority of their code working now. It is great for them to have as hardware that will closely match the actual robot.
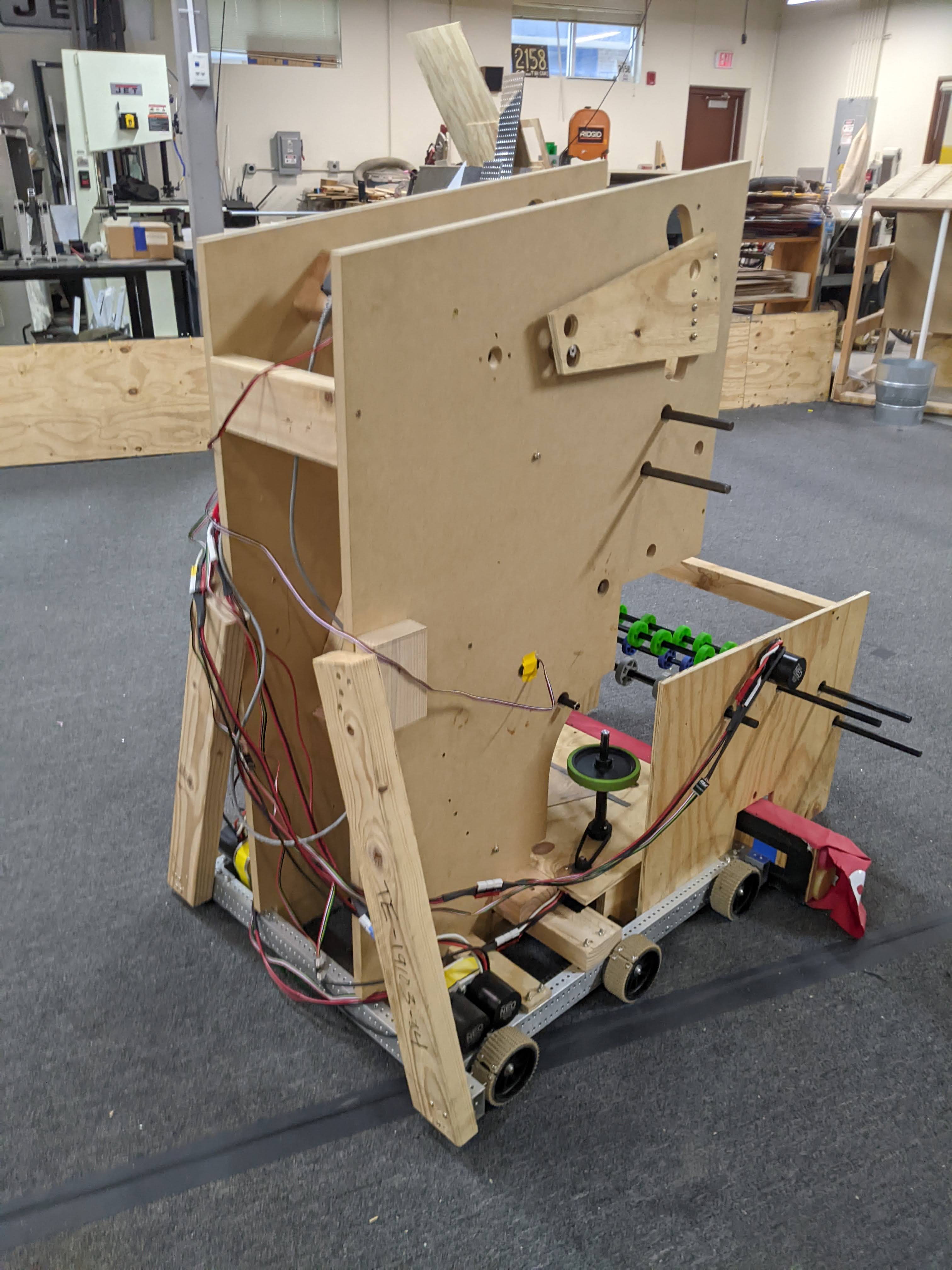
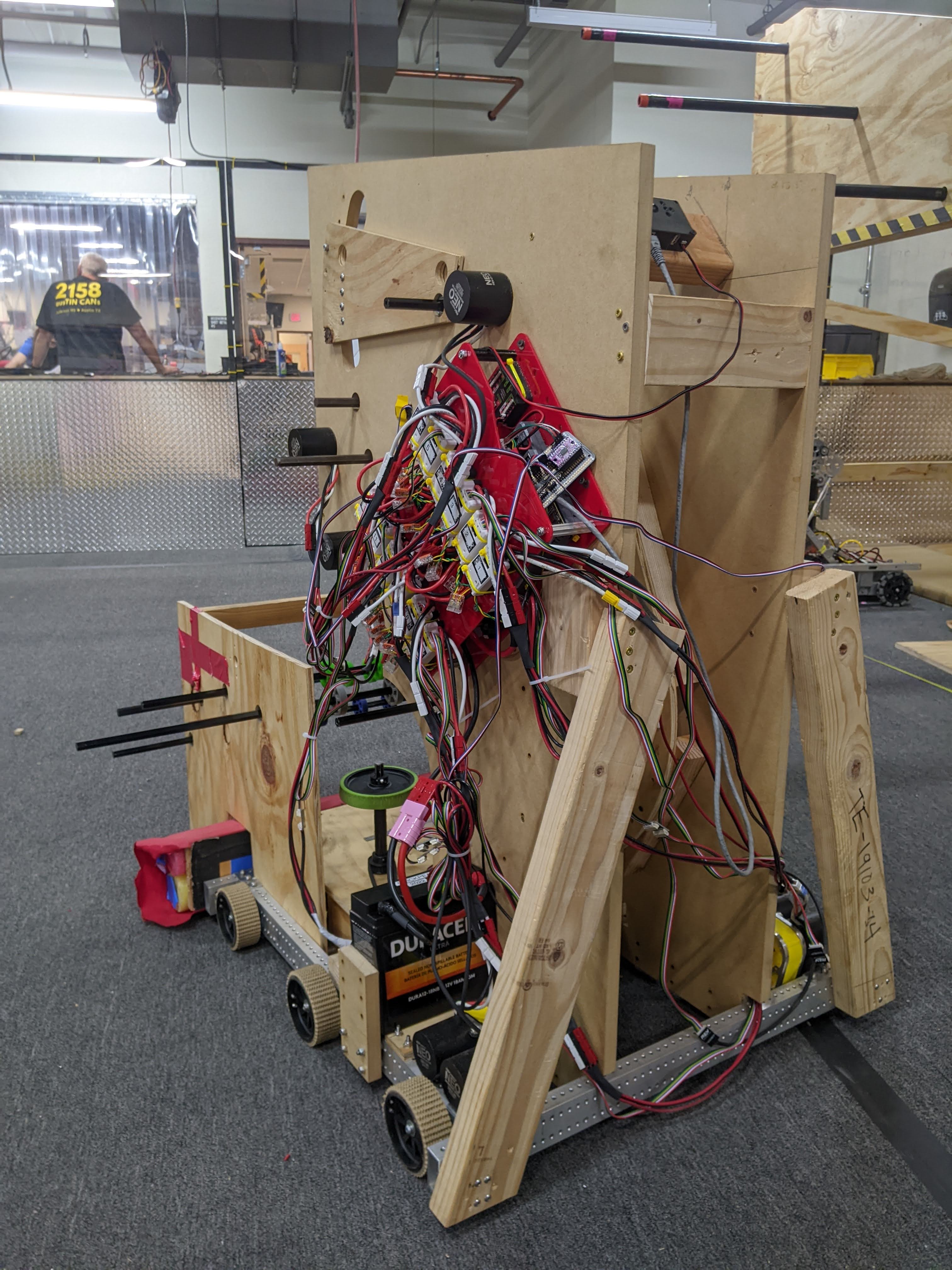


The wiring was super rough on the MDF bot but it mostly held up. Tomorrow we are going to inspect the gearboxes for wear. The drive base that the MDF bot was mounted on is the one for our second robot.
We pulled through and at the end of the day, well 30 minutes past, we had a mostly complete robot. Its missing the wiring for four motors, and the limelight. There are a tons of different improvements we’ve been making in CAD whilst completing assembly. Tomorrow we will be finishing the second round of design review on the variable hood shooter. Hopefully it doesn’t need too many tweaks so we can release it to manufacturing soon. We will also be releasing some of the shafts and parts we don’t think will change to manufacturing so we can get a start on our second robot. We weight the robot and its currently at 92 lbs. Its missing a few things and will gain a bit of weight when we add the variable hood.


Schedule
So tomorrow will be a lot of testing with programming to get the robot into a working state. All of our CAN Ids are changing. There will also be a few differences between the MDF bot and the real bot that might require a bit of tweaking. We have 23 days until our first event, Austin district event. We hope to add a variable hood, and a traversal climber before then. We also will keep this robot functional for programming to work on autonomous and our drivers to get a ton of practice.

Leave a comment