
Today the robot was mostly reserved for programming. But first we changed the ultra planetary gearboxes on the singulator to a lower reduction(I think 5:1, used to be 20:1). This has eliminated most dead zones(we only saw 1 in an hour of driving practice). The cargo starts in the previous dead zone and doesn’t get stuck. We also added some quick hard stops to the intake to prevent the plates from sliding past each other. When the intake plates fell past each other the rollers were no longer at the correct height to intake the ball against the bumper.
Programming managed to get the cargo moving through the CDS automatically. Its really cool to see that come to life, the robot is behaving more like a robot, and the driver has to worry about one less thing. It also gives us better control and knowledge of where the cargo ends up in the system.

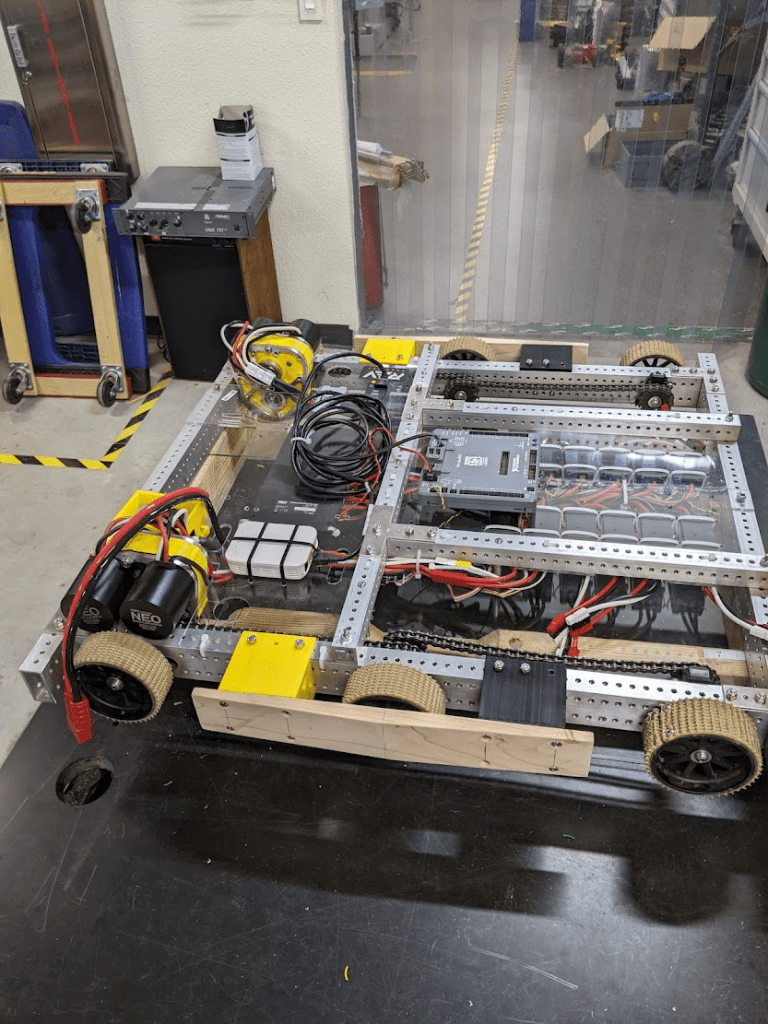
They also spent a bit of time testing PID control on the climber. We didn’t get very much progress on this front, and we had to stop early as we are constrained on by robot testing time at the moment. It would be really nice if our second robot was up and running right now. The second robot’s electrical panel got a great start to it today. All of the important hardware was mounted, and the majority of the power distribution wires were added. The drive motors got fully wired up too.
Well maybe not too soon. Looking at Trello the subsystem cards, that have a link to every unique part a subsystem is made up of, is a little daunting. We have 13 parts for the intake, 8 for the variable shooter, and 9 in the CDS assembly. There are a lot of shafts, and standoffs to make. A few router and 3D printed pieces which will go quickly. We ran out of power pole metal crimps today which is a little sad. It turns out 300 piece set, 100 in 3 colors, doesn’t go very far when you have 12 Neos, two connections between each and two robots. Next year we will probably make the switch to Wago 221 inline connectors, they are so much cheaper than power poles and you don’t have to crimp them(so you can’t waste any part of it).
It was a Saturday today and I expected attendance to be on the lighter side, so I decided to bring my dog Annie. Shop dogs are always a great moral boost. She is a little goofy so she got to stay with the business team for half of the day. People took dog breaks, Annie made friends it was a good time.



Towards the end of the day we managed to get a good chunk of time for driver practice. We had one issue with a ultra planetary, the screws fore the hex shaft adapter had worked loos and the shaft was barely hanging on. We still are having issues with I2C causing hard lock ups on the roborio. We have some solutions in progress by offloading the I2C to a raspberry pi. At the end of the night we inspected the robot for wear. We found the tread to be wearing a bit faster on the front two wheels and the driver gearboxes fasteners need to be tightened.
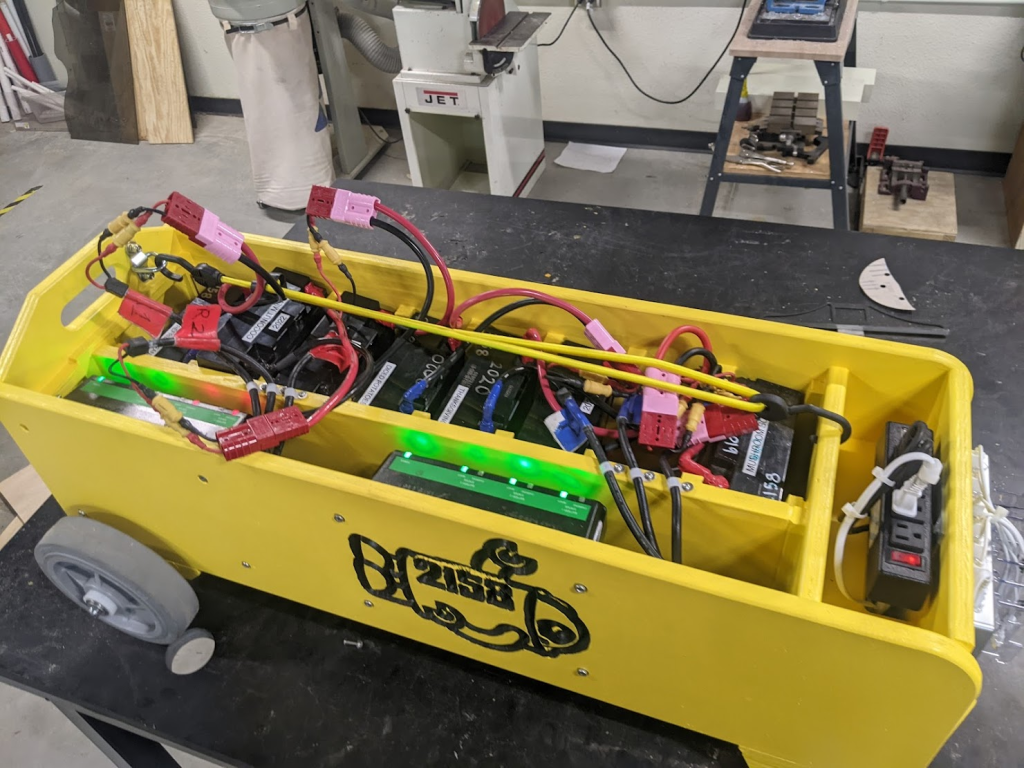
The battery cart was mostly finished today, we are just missing four plastic sliders(we accidentally bought 4″ ones instead of 2″ ones). Thanks to team 33 for providing the excellent plans for the battery cart. We added one modification, a 6 port USB C charger for phones at the top. Should hopefully help keep the pit a little bit more clean.
Ton was a very productive day all around the team. I’m sure I’m missing something in the recap. Its amazing to see all the progress that was made today. Its also amazing that we have 18 days before our first competition and we have a robot that is playing the majority of the game. Sure we havn’t climbed yet but we will do that soon!

Leave a comment