
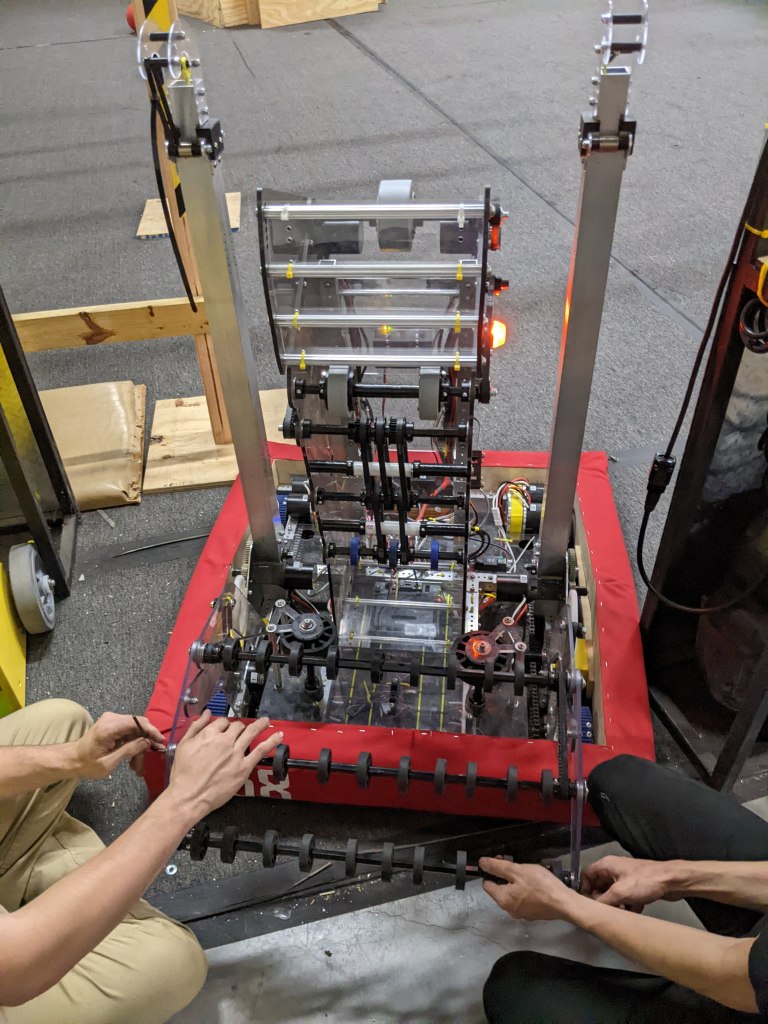
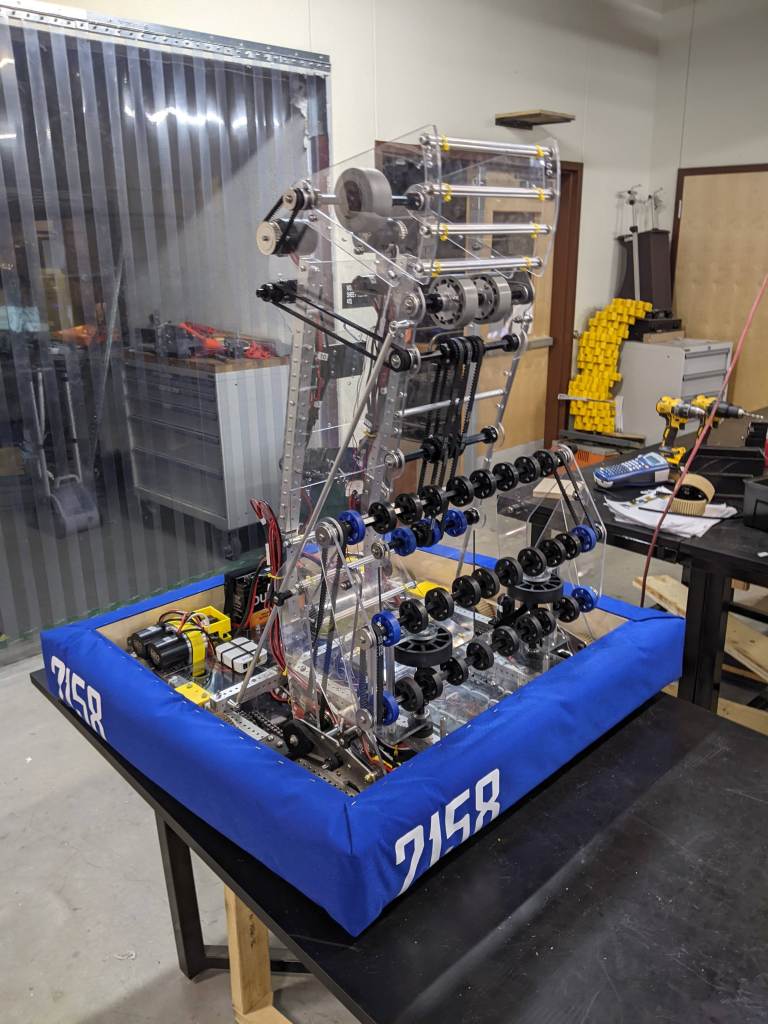
It time to start seeing double! We managed to get the second robot fully assembled today, wired up and running with some code! It looks like two robots but its really some where around 1.5 – 1.7 robots. The second robot is missing the entire climb. It might get the honor of testing our the traversal climb when we get that far. The first robot has a few missing lessons learned(from assembly) that will need to get fixed. The first robot will probably become the competition robot because it has more of the wiring complete and more motor controllers. We probably need to add a little weight to the second bot so it drive about the same.
Once we finished the second robot we decided to perform a quick maintenance on the first robot. The tread is gone from the two front wheels and mostly gone from the back wheels. We switched the tread out with the blue nitrile tread from Thrifty Bot hopefully it holds up a little longer. We riveted the tread onto the wheels this time, it was much easier than screwing them in. Also a few of our holes on the wheels were cross threaded because these wheels are reused from previous years. We added an RSL to the robot and switched out the shooter plates. More on that below.
We’ve been having some inconsistency in the shooter. We took around 30 shots on Saturday and we had 24 hits and 14 misses, 66% accuracy. That is better than the break even point for the high goal but its still not great.. We gathered a bunch of slow motion video and looked at what the shooter was doing with the cargo.
The cargo is ping ponging off between the stopper wheel and the flywheel. We tried to lower the compression of the stopper wheel but that didn’t reduce the ping ponging by much. We theorized that the problem was coming from the fact that the stopper wheel isn’t in line with the hood. So the cargo gets launched between the stopper wheel and the flywheel into the back of the hood. This causes the cargo to ricochet off the hood instead of following the hood smoothly.
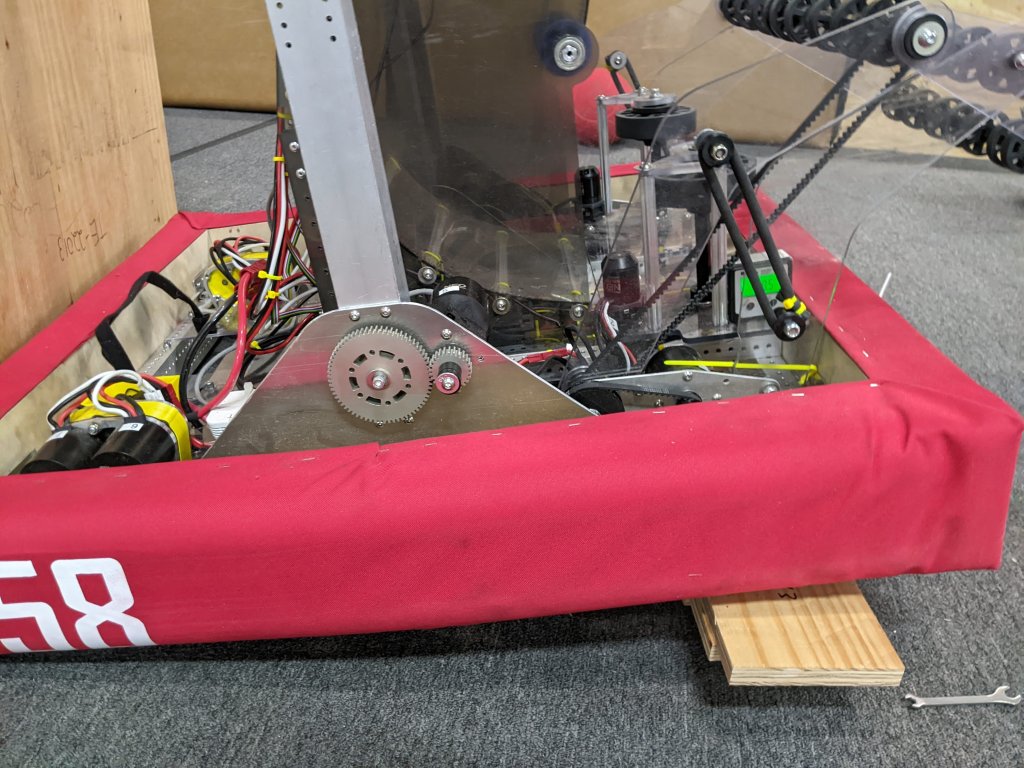
We managed to prototype a quick fix to test our theory by cutting some 1/2″ wood scraps and showing them between the stand offs. This made the cargo follow the trajectory more smoothly.
This changed cause the trajectory of the cargo to change massively. We aren’t trying to aim a ricochet anymore and needed more hood wrap to make the cargo into the goal. We didn’t have a great idea of the angle we needed so we did some more quick prototyping, we grabbed the digital angle sensor and some wood to prop the robot up. We ended at an angle of 9.5 degrees plus the 12 degree angle in the hood. There was a bit of uncertainty in what angle would work the best so we cut a new fixed plate hood with increments to test 24 – 14 degrees of wrap in 2 degree increments. This new plate allowed us to quickly test the angle.

This new setup brought the consistency we were looking for. We shot 30 cargo on the test setup and not a single shot missed. The plates were attached to the robot and we took a few more test shots to dial in the angle. 22 degrees was the angle we are settling on for now. We took 21 shots and not a single one missed the goal.

The robot got some fancy new lifting handles today during the pit stop mentioned above. They are cut from HDPE and got a smooth edge from the manual router. They make lifting the robot so nice. I’m definitely expecting this level of handles or better next year.
At the end of the night we spent an hour or so running driver practice. We are getting pretty good at scoring from the fender. The robot is also impossible to move once its at the fender and has a bit forward throttle applied. In two practice runs we had a run of 12 cargo in the upper hub and 2 misses, and 11 cargo in the upper hub and 2 misses. Both runs were 2 minutes with 7 cargo 3 blue , 4 red. As the drive coach I was switching which color cargo the driver was going for to increase the “chaos” factor. Real games on the field will not have all of the cargo still and there are a few(5) robots missing so we need to add a bit to the “chaos” factor.

Leave a comment