
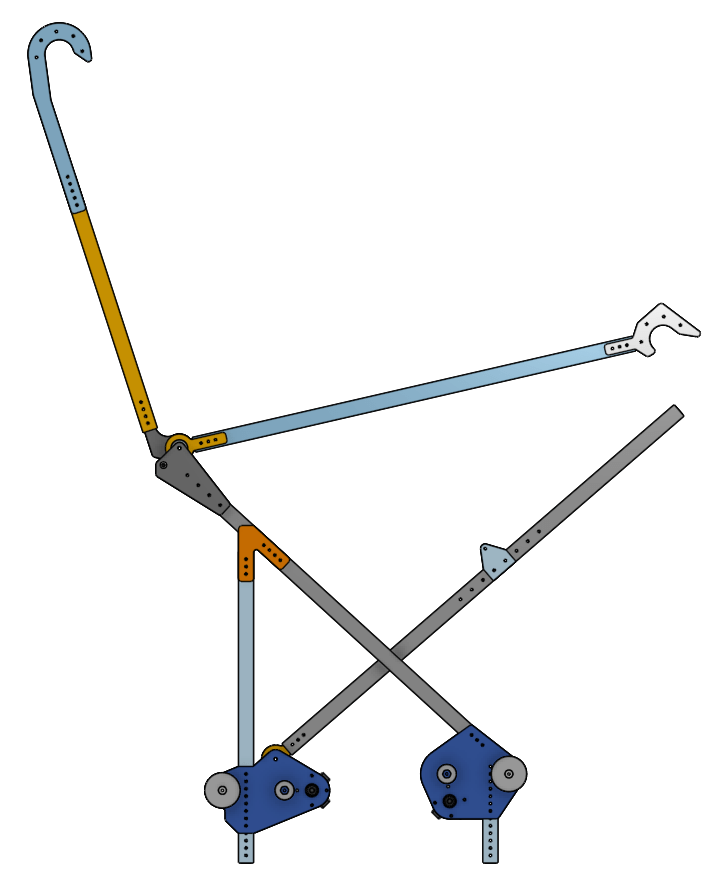
The CAD students worked out the remaining questions on the traversal climber today. So far we have one or two outstanding items. We have managed to get the first version of parts out to manufacturing and we are working on solving the last remaining problems with a different hook setup. Our traversal climb is inspired by 125’s climb. We will most definitely have problems that we need to solve once we have it all made.
The programming team today was focused on improving the color sensor and the autonomous routines. The color sensor code was rewritten into a state machine and individual commands to make testing and debugging easier. The code isn’t quiet usable yet, its unable to handle in taking two cargo at once, it can miss a cargo, and it can’t shoot cargo out of the top of the shooter. If we manage to solve all of the problems it would be beneficial to use at competition. The color sensors is/was something that looks easy at the start and gets harder and harder as you think it through more.
The autonomous team is working on getting a four cargo auto added. Today we got the individual paths working at a consistent rate. Then we changed all the paths together required for the four cargo auto. It worked okay, we lost a bit of positioning, but we should still make the shots and intake the cargo. Next is adding the intake and shooting commands. Currently we are at 12 seconds with out any other commands. We might have to shave some time off, and increase the path speed again.

Leave a comment