
It was a busy day with some ups, and some big downs. The day started off with a visit from the shop dog Annie. She keeps the business students company every Saturday morning until about lunch these days. Annie provides a nice relief for the students and it tires her out which is a win win.
Today programming managed to trim down the 4 cargo auto routine to be under 15 seconds! It didn’t even take drastic measure like running into the field to stop faster. Just shortened a few paths and reduced the shooting time, and just like that the 4 cargo auto is under 15 seconds! The four cargo auto routine is huge. It almost doubles our autonomous score and we only need one additional cargo during auto from our alliance partners for the quintet. We are also practicing our human player to attempt the shot to secure the quintet. In addition to the four cargo routine our programming team has also created a 3 cargo routine. We’ve certainly upped our auto game for our second event! Not sure how we are going to up it again for DCMP.
Programming also continued to work with the color sensors. We are having issues with the color sensors detecting the color fast enough. We increased the read rate of the color sensors to 40 hz and now we correctly move cargo through the CDS nicely with few errors. Maybe after another few weeks of testing and tweaking we’ll get to use it at competition.
The main focus for the rest of the team today was the traversal climb. We are cutting it very close to the wire and it would have been nice if it had worked out today. The final pieces for the traversal climb were being cut on the router while the rest of it was being assembled. Towards the end of the day we finally got a chance to get all of the structure on the robot and ready for a mock climb with humans doing all of the hard work.
After we dragged the second robot(which is the test bed for the traversal climb) out to the field we started lifting the robot up. The goal is to try and prove out all of the transitions and make sure that we will be able to actually climb. We didn’t get very far before we ran into a pretty big issue. The high rung is preventing us from hooking the traversal run because its colliding with the shooter.
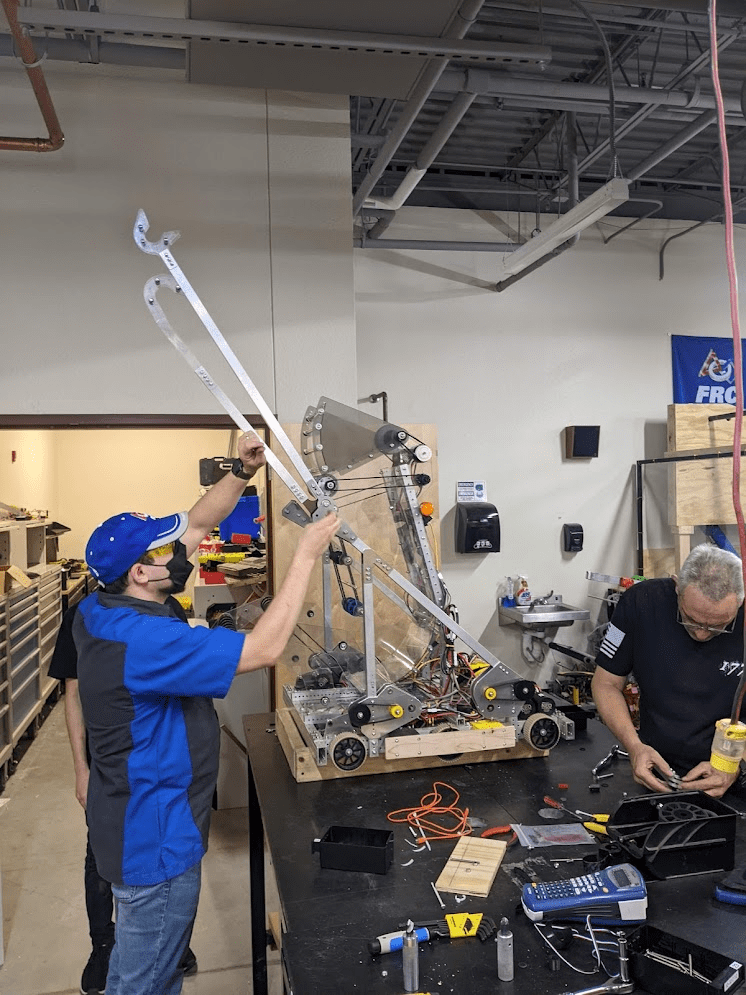
It was one of those moments where every one’s moral just craters. The students are looking on, thinking what went wrong. The mentors are scratching their heads thinking why didn’t we catch that. The CAD is check to see if we made errors. The field is checked as a last ditch hope to see if we just made it wrong. Nope, the errors where made in CAD, the assembly we tested the climb transitions on did not have the shooter assembly so we missed the fairly obvious collision. The team stares at the climber for an hour as we discuss ways to fix it.
Eventually a plan is formed. It’s not the end of the world, it seems like we can make it work with a few simple geometry changes. The passive hook off the back of the robot needs to go higher, and come in a bit. That will allow the high run to clear the shooter and we should be able to hook onto the traversal rung. In order for the geometry changes to fit inside the frame perimeter we have to add a second passive deploy to the passive hooks. They will now need to flip out twice.
The high run collision wasn’t the only problem we were having with the traversal climber. There are a few spots where fasteners don’t have clearance 😦 . I’ve added a requirement for next year design reviews, to check that all fasteners are added. We also had troubles getting enough spring force to lift both the climber hook, and the passive hook. We are probably going to be able to solve that by adding on two 10 lb gas shocks to the climber hooks. The cable routing also has a little problem of running into stuff, we can reuse a plate we already have in cad to route the cable better. We also need to add a hard stop to allow us to reuse the existing bracket and 1 x 1 box tube for the new geometry.
Phew, that’s a lot of stuff to get done in basically two meetings. We will be packing up for Amarillo on Wednesday night so it needs to be mostly done before then. I sent a plea to the CAD slack attempting to get as many students to show up as possible tomorrow by bribing them with lunch. I think we can pull it all off if we put in the effort tomorrow and Tuesday.

Leave a comment