
Wow, uh missed a few posts here, I’ve spent more time in the lab than sleeping since Sunday. The team is definitely feeling the crunch trying to get the traversal climber working. Sunday and Monday were filled with trouble shooting. We tested found a problem, thought of a solution, tested, and repeated the cycle multiple times over the two days.
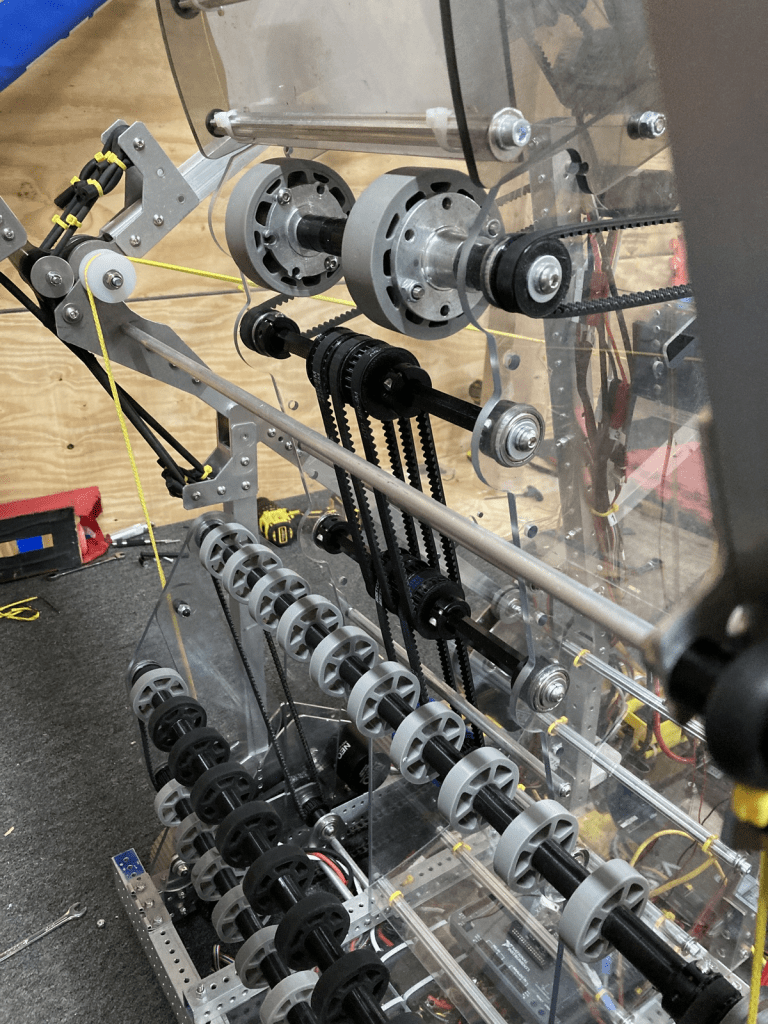
The problems certainly came faster than the solutions. Our first problem was how to deploy the passive arms, the which arms and the middle poles. In the below photo ,left to right, passive arms, winch arms, and middle arms. We temporarily solved deploying the winch arms with surgical tubing wrapped around the joint and two L brackets.

Our second problem came after we got all of the traversal parts mounted and wired to the robot. The middle pole was not contacting the high rung when we need it to to bring the passive hooks up on to the traversal rung. The problem was two fold, the middle poles were too close to the passive hooks and the hooks where too short. The first part of the problem we fixed by moving the pivot point of the middle arms. Its a dead axle pivot and the arm is spring retracted with a winch. All we had to do to move the middle arm was drill a new hole and make a little longer rope for the new position. The spring and winched allowed us to relocate a whole arm with out touching/considering the gearbox(what powers said mechanism) this was absolutely clutch.
We managed to test our solution to the second part of the problem by cutting some solid aluminum round stock and jamming it into the 1 x 1 of the middle pole. We then cut the pole to a size that would fit into the frame perimeter when tilted.
The third problem came from the surgical tubing, the way it was wrapping around the joint was causing tears to form. Eventually the surgical tubing will break and then the winch arm/passive arm would get stuck down/not deploy. The surgical tubing worked almost good enough. We discovered this on Monday night and tried to find a solution. I managed to find exactly one gas strut that had enough stroke and low enough force to work to deploy the winch arms on Amazon. The winner gas strut was 15″ long, 9″ when compressed and had a force of 22lbs. It also was able to be delivered before 6pm the same day. I ordered this spring at 12:10am and got the spring at 1:40pm the same day. Absolutely amazing, Amazon saving the day.
We left Monday night with a long list of items to try and fix for Tuesday.
- Extend the middle pole to 42″ from the new pivot point
- Add a cross bar to brace each side
- Replace 3D printed 18 T pullies(we rounded the hex on a few)
- More Cable
- Gas Shocks?!?!
- Tinker with release of passive hooks
Tuesday is a regular team meeting so it started off a bit slow, we didn’t do a recap today(probably should have). The gas shocks had come in and we set off to making some mounting brackets to attach it to the robot. Eventually we managed to check off all the items on our list and it was time to climb again!
And it works!?! Amazing, 30 days of work for the traversal climb. We started off inspired by 125 and worked to adapt it to our robot. It took us a bit of time, it wasn’t our 100% focus until recently. But we did it. We pulled it off, it works we climb 8 times tonight and didn’t fall. We have changes to make, its a little slow at the moment, we have a few code problems but it works.
Bonus problem, the poly carbonate bracket the holds the passive hooks started to develop stress fractures. Another mentor did some FEA after the meeting, the poly carbonate bracket had a safety factor of 1.3, and when we impacted our poorly setup hanger replica(we had the wall way to close to the traversal run, and created a problem for ourselves, hitting the backing) we exceeded the limits of the poly carbonate bracket and it started to slowly fail. We are remaking the bracket in aluminum and it now has a safety factor of 8.

Small teaser, can we get a go cans?


Leave a comment