
The journey to Amarillo is a long one for us, the team left early Thursday morning, all of the students on the charter bus and the trailer with an additional mentor car headed out to the edge of Texas. The ride was quiet and calm we arrived at the convention center on Thursday around 4:00 pm. The trailer hadn’t quiet made it there yet. A few other mentors and myself started to help with the field setup. We wired the hub’s sensors and set out all of the tape lines for the field. It was quickly discovered that the field was on an ice rink. Exciting, and cold!
Eventually the trailer made it to the convention center and the students began unloading it and setting up the pit. They quickly got the pit setup and we went to get inspected. We breezed through inspection and got thanked for not having pneumatic by the robot inspector. The robot with the traversal climb weighed in at 115lbs. We swapped our middle rung hooks for some freshly painted yellow ones!
With inspection past us the team wrapped up and headed out of the venue for the night. The next morning we got a good start by playing in the first practice match. We found a problem with the passive hooks that caused them to deploy on the first hit with another robot. We were under the incorrect assumption that if our passive hooks deployed outside the hanger zone we would not be credited with climb points. With our passive hooks deployed we went to the hanger zone and attempted to climb on the hangar. We managed to get ourselves all of the way to the traversal rung! The team went back to the pit to solve the early deploy problem with the passive hooks.
Autonomous runs a command which winches back the middle poles of the climber, we tweaked the position that it is attempting to hold to be further back to better secure the passive hooks. These tweaks were completed just as the final practice match was ending. So we didn’t get to attend more than one practice match. Our first qualification match we hit the ground running. Scoring a decent number of cargo into the upper hub and we managed to get hang on the traversal rung!

We won our first match but and started running into our old friend bounce out, we didn’t know at the time but this problem would continue to get worse as the day went on. We continued to weak the traversal climb between the first and second match hoping to find a better solution to keeping the passive hooks down.
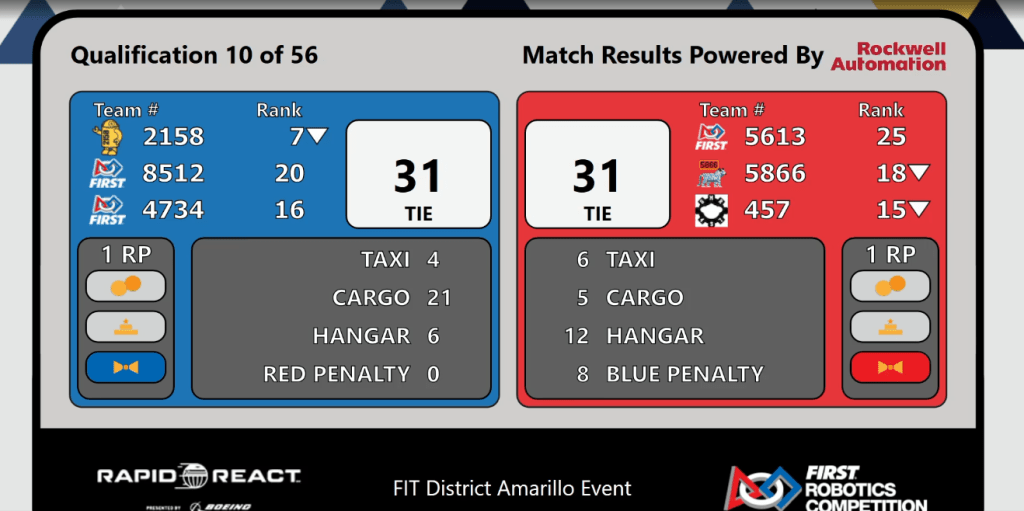
Our second match started rough like the first one. The second cargo we shot kept falling short. This caused our four ball autonomous to be a really long 2 ball autonomous. That match we encountered our first instance of effective defense. We had a rough time trying to shoot cargo and had one of our passive hooks deploy so we didn’t attempt a climb thinking it wouldn’t count. We tied that match 31 – 31 that hurts, another tie.
Things started to go down hill from there. We had a quick turn around(3 match) and didn’t figure out any way to solve the passive hook problem. This would be one of four matches that we only had 3 matches in between. I can’t begin to explain how rough that is. We get our robot off the field, onto the cart. Two minutes late the next match starts and they start queuing our next match. We get to the pit swap bumpers and reset the climber. We don’t even have time to look at the match footage or try and fix any problems we found that match.
The next match our auto once again misses two of the four cargo. We manage to shoot a decent number of cargo into the upper hub before attempting to climb. The robot started to brown out while climbing, another problem. We won that match and headed back to the pit, the battery had a loose connection on the battery terminal which might have caused the brown out issues while climbing.
The problems continue through out the day. In qualification match 16 our robot did a cool dance move during autonomous because the navx was not screwed in and came unplugged. That same match we knocked our selves the middle rung after our mid rung arms did not un spool properly. The robot landed directly on the intake and bounced right back, nothing was damaged. We needed to fix the traversal climber so it un spooled nicely.
Next match in 4 matches, we work a bit on the un spooling problem, we don’t come up with any answers yet. Our auto hits 3 / 4 cargo a little better, but we were hitting 4/4 every time in our lab. Not good enough yet. About halfway through the next match our cargo delivery system motor comes unplugged and we can’t shoot any more. Another problem… We line up to climb at 60 seconds remaining because we can no longer score cargo. Our middle arms correctly deploy, and then we over winch them and struggle getting them to the correct height for a while. Eventually we figure it out and mange to climb to the traversal rung.
Another 3 match turn around and we are playing again. We plugged in our motor and zip tied the power pole connectors together. Our autonomous hit 4/4 cargo in this match. We figured it out, when we reduced the CDS belt speed to reduce mid air collisions it reduced the speed of the second shot of the cargo during auto. Our shooter is not well tuned at the moment, and the first cargo drastically lower the rpm and the second one shoots before the rpm is correct again. Increasing the CDS belt speed fix our second shot during autonomous. We manage to score a decent number of cargo into the upper hub but miss out on the cargo rp by 2. We head to climb at 35 seconds and encounter a dead blue robot in the hangar zone. We manage to move them before 30 seconds, but then don’t have enough time to complete our traversal climb. The arms once again deploy poorly and we only get one hook on the middle rung and can’t climb.
The problems continued through out the day. Small things, big things, we kept running into problems. At the end of the day I was cleaning up the pit and trying to put a way a bottle of simple green when the top came off and It spilled everywhere. Basically our whole day was like that one moment, odd stuff happening that causes us problems.
Our shots kept bouncing out and we couldn’t figure out why. The cargo seemed to be gaining way to much energy and going way to high. We went to the practice field and managed to figure it out. We took shot after shot and encountered no bounce out. We were confused. Eventually we figured it out the cargo on the field was way over inflated. I pumped up both cargo to 5psi and we got bounce out after bounce out. We had already played our last match for the day, and I wanted to confirm our theory, I asked the FTA if we could measure the field cargo’s psi, sure enough each cargo was between 4.5psi and 5 psi. The cargo was filled at the beginning of the day after being on cold ice. As the event went on the cargo warmed up and gain psi. We could work with that knowing what was wrong.
First match Saturday morning we a rule clarification that even if our climber deploys early we would still be able to get hanging points. Interesting, kinda of upsetting that we played the majority of our matches with the thought that it wouldn’t count if deployed early. In qualification match 47 we end 1 cargo away from the ranking point. We spent the last 35 seconds chasing cargo around and still didn’t get the ranking point. Very sad times. We could have spent that time climbing and winning the match. Bad call on my part. The fact we couldn’t get the cargo was the worst part.
The next match we run our two cargo auto to show off that we would be great alliance partners to teams with a four cargo auto. We miss both shots, I’m pretty sure I died in side. We miss a ton of shots in this match because the cargo is once again over inflated and we needed to lower our shooter’s rpm. Our climber’s mid arm once again fails to deploy correctly and we don’t get our climb. A terrible way for us to end our qualification matches.
We ended the day ranked 9, we got picked by the second alliance captain 7492 The Cavbots! I was thrilled to be picked so early glad to get to play with some friends made in Del Rio during 2020. We won our first two quarter finals matches. Bounce out once again strikes, we end up missing a lot of shots and only make one cargo during auto. Our mid arms didn’t deploy once again during QF 3-1. During QF 3-2 our hooks take a bit of time to get unwound/going up correctly once they do we manage to climb in under 15 seconds.
We encounter very tough defense during the semi final matches. Our climber once again doesn’t deploy correctly the first time. Its clear we need to fix the climber to deploy correctly every time with the press of a button. Our battery must have been low because once we hook the middle rung and start going up its very jittery like we are browning out. The jitters cause the robot to bounce off the middle rung and we take a small tumble. Semi finals two plays very similar to the first one but we manage to rack up 24 penalty points while playing.
- 6:54:58 G207 from alliance partner 4 pts
- 6:55:20 G204 from us 4pts
- 6:55:29 G204 from us (HR signals x2 with fingers not sure what that means) 4pts (So we must have gotten x2 here in quick succession for the points to get up to 28)
- 6:56:00 Either G204 or G106 on us our hook deployed up and no ref flagged it yet. 4pts
- 6:56:06 G204 from us 4pts
- 6:56:12 G106 on us for leaving the hangar zone after hook deployed 4pts
Doesn’t feel good to get that many penalty points in a single match. Really doesn’t feel great when all you are doing is trying to play the game and a defensive robot is able to draw penalties off of you by just running into your intake. We didn’t manage to climb during the last match because we foolishly removed the limits on drive speed while climber is enabled and couldn’t line up with full speed.
Our team was eliminated in the semi finals but the story doesn’t end there. I was recognized for being nominated by our students for the Woodie Flowers Award. At district champs I’ll be the one of many great mentors who will be judge and only one will be selected to win Woodie Flowers Finalist award. Our team also managed to pick up the Autonomous award for our multiple auto routines and the use of color sensors in our cargo delivery system. We earned a total of 45 district points, putting us as the 33rd team in Texas.
District championship is next week Wednesday. We have 2 days of meeting and 3 problems to fix. We have ideas on how to achieve each of the items below but its going to be a very busy 2 meetings in order to get them all done for district championships.
- Retractable Intake
- Fix Climber Deploy so its bullet proof
- Reduce bounce out

Leave a comment