
With only two meetings left in the year I’ve finished our kick off plan early enough to share with the community. The basic idea is a series of group activities followed by a whole team discussion. The activities we plan on doing are Rule Reading, Ways to Score, Scoring Analysis and What Our Robot Must Do, Could Do, and Won’t Do. Each activity has detailed instructions and expected out comes. Some activities include helpful tips, or outline our reasoning for changing it from last year. If you want to see how we plan to run kick off you can find all the details on the Kick Off Resource Page
Mock Kick Off
This week we are running a Mock Kick Off exercise with all of our students. Last week we covered evergreen rules as a team, this means that we can get by without reading the whole rule book during our mock kick off. This is great because we don’t have enough time during our weekly meetings to get through our entire kick off plan. We should be able to squeeze in ways to score, scoring analysis and team discussions about both. If we are quick we might be able to do the What Our Robot Must Do, Could Do, and Won’t Do activity.
In order to complete the ways to score and scoring analysis we need to have a game summary sheet. This summary sheet should contain the important rules, key locations on the field, rules related to scoring, how to score points and how to earn ranking points. You can find a 2017 Game Summary we’ve created here.
Swerve
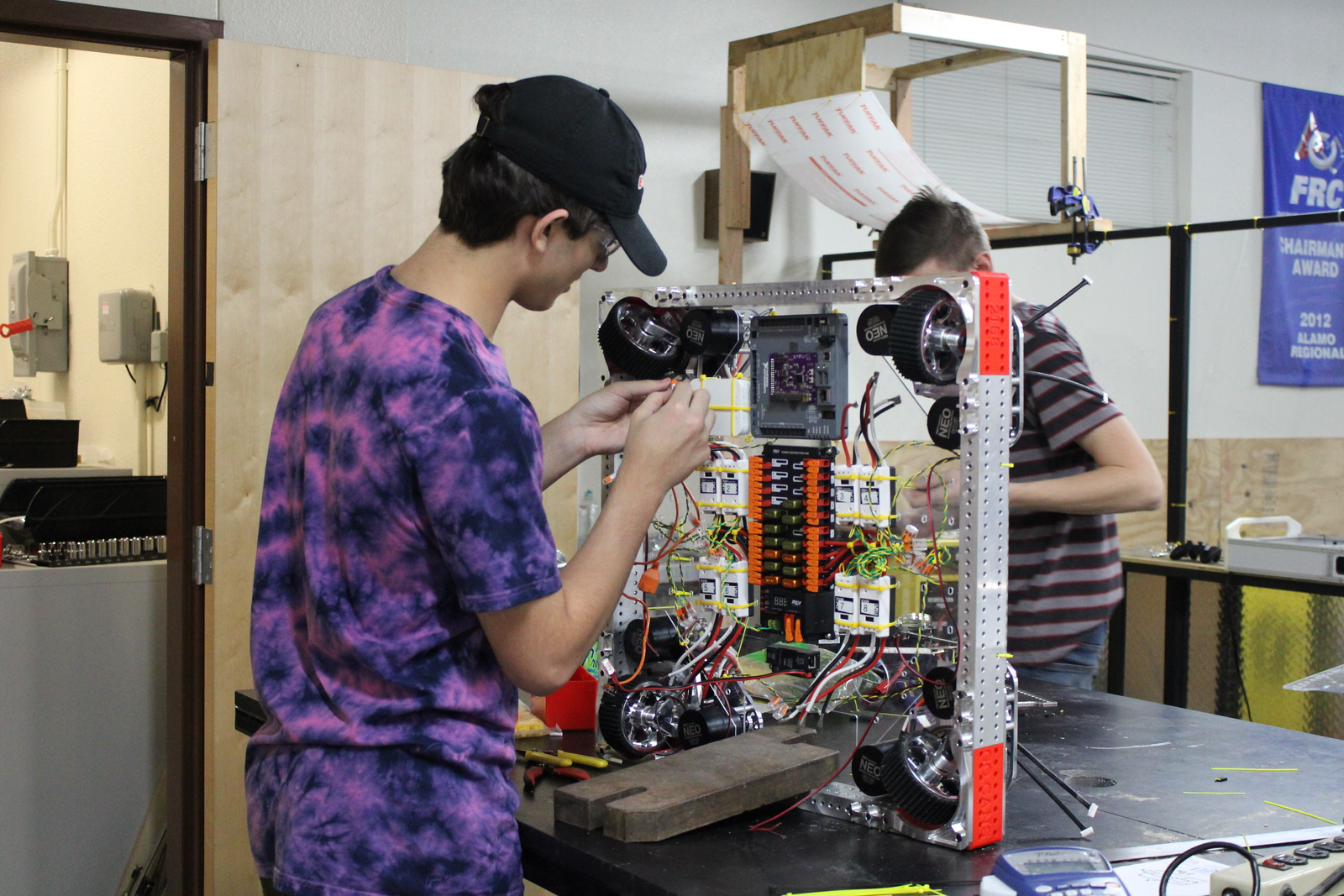
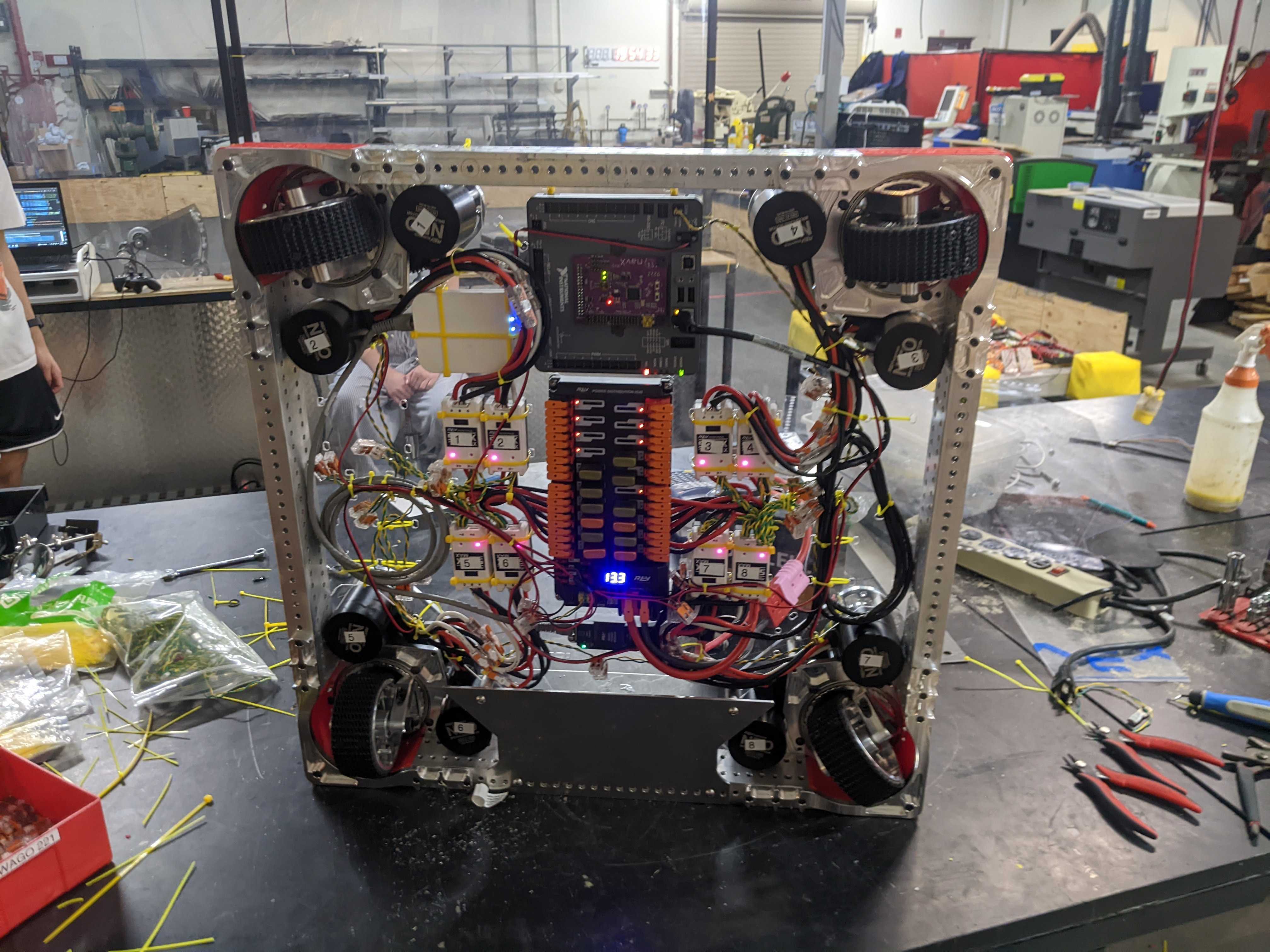
The swerve drive finally came all the way together last week Wednesday. It took a bit long to get the top brain pan cut on the router. This plate holds all of the electronics on it so couldn’t get far on wiring with out it.
This is our first time using Wago 221 Inline Splicing Connectors and they are great to work with. The student’s love not having to crimp power poles any more. I love not wasting 50 cents on a failed crimp. They are also so much easier to take apart, and you can’t assemble two of them side by side making an impossible to remove connection.
During assembly we’ve identified a few things we want to change with our swerve frame and electronics design:
- More wire zip tie down holes along the edges
- Pass through holes for battery cable (Whoops)
- Roborio mounting holes are slightly out of alignment
- Offset top and bottom panel mounting holes. So we can unbolt one plate at a time.
- Add motor and encoder wire pass through holes near spark maxes
- Velcro strap for battery containment
A great first go at the brain pan. Most of these changes are simple and have already been made. The current frame size is the smallest we would ever likely make a robot at 24″ x 24″. It is a bit of a struggle to get all of the wires nicely cable managed, and we have room to add 12 more motor controllers.
Programming
A few returning members on programming have been working on testing our swerve code. They’ve fixed a few bugs and we are getting close to being able to drive. The entire swerve project is only about a two months behind :).
The new members have been learning closed loop position based control. A few years back we made a simple arm test fixture that can easily be added to robots to practice position closed loop control. It is a piece of 1 x 1 attached to a sprocket and a 50:1 gearbox to a Neo.
Metal For 2023 Season
This year we’ve actually managed to get a metal order in before kick off. We’ve ordered the following:
- 4’ x 8’ of 1/8” aluminum sheet
- 48’ of 1” x 1” 1/8” aluminum box tube
- 24’ of 1” x 1” 1/16” aluminum box tube
- 24’ of 2” x 1” 1/8” aluminum box tube
- 20’ of 3/8” aluminum round stock
The shop already has the following items on hand:
- 24′ of 2” x 1” 1/8” aluminum box tube
- 30′ of 3/4″ aluminum round stock
This should hopefully be enough metal for two robots this year. Its not really a huge problem if we have to order more metal but it can save two days and a lot of stress if we have it on hand.
Another Night of The Robots
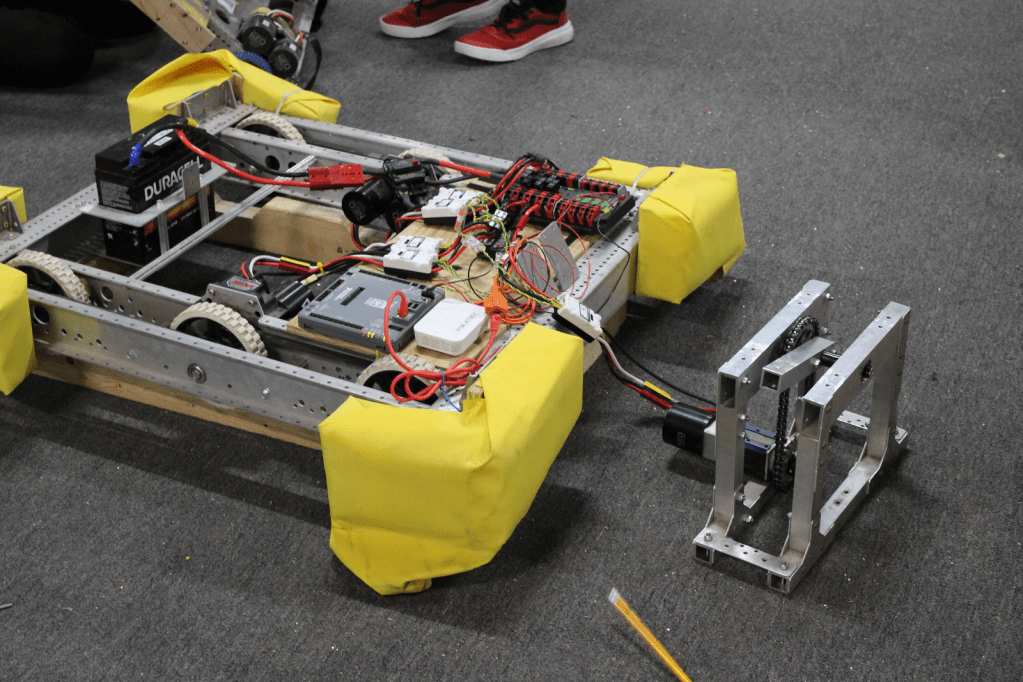
We hosted another Night of the Robots event last week. I feel bad for our 2022 robot and our batteries(we will be getting new batteries for competition), it now lives a rough life demoing for 3 hours at a time. Most of it has held up great, but a few of our Neo 550s really don’t enjoy being ran for that long. No complete failures yet surprisingly but I think we should add some cooling to them.


Leave a comment