
Today was the second day in our kick off journey, to start the day we got our whole team together and discussed what our robot must do, could do, and won’t do. After an hour of back and forth we come up with this preliminary list. The placement of actions on this list is not final, items will move around as we learn more information(from prototyping, outside sources, etc…) Also this list is not ranked/ordered in any way.
Must Do
- Get Mobility Points in auto
- Never Die on Field
- Never Tip
- Score Preload in Auto
- Retract Intake So We Don’t Get G204’s
- Floor Cone Intake
- Move Sideways
- Dock and Engage in Auto and Teleop
- Score Cones High + Mid + Low in Teleop
- Push Cubes to Low
- Scoring Alignment Assist
- Buddy Dock and Engagement
- Not Get Stuck
Could Do
- Floor Cube Intake
- If we do Floor Cube Intake We must
- Score Cube High and Mid
- Be Gentle With Cubes(Don’t Pop)
- Automated Scoring Alignment
- Teleop Docking Engage assistance
- Score additional game pieces in auto
Won’t Do
- YEEEEET (Shoot Cubes)
- Have a mechanism that prevents us from getting pushed
This discussion also resulted list of questions that we want to find the answers to. These answers will possibly move items around the above list.
- Look at slider position relative to goals
- Figure out how hard it is to dock and engage on the charge station with another robot. Now make the other driver nervous and under time pressure. How hard is it?
- Understand the durability of a cube
- How to intake cones
- How well does our swerve drive base go up a charge station?
In addition to this list of things to figure out we also identified the next tasks, starting on the field build and brainstorming how to solve actions on our must do list.
After we finished our lists we let the students decide if they wanted to opt into continuing brainstorming/prototyping or go to their departments and start work there.
This allowed us to start building two wooden outer grids, and one coop grid. We are also planning on building the field(metal and poly carbonate) version of the charging station. This didn’t get started today, but we looked at the material list and made a shopping list.

Brainstorming
To start the brainstorming session we gathered into small groups and then assigned which tasks each group was responsible for brainstorming ideas on. Then each group found different ideas and created a power point slide to share with the entire group.
We used the ideas presented by the groups to come up with a list of different ways to solve actions. Then we reformed into larger groups to start prototyping. We had one group focus on overhead roller cone intake, another group focus on vertical roller intake, and the last group focus on buddy docking and engaging.
Prototyping
First thing we did to prototype was trying to intake cubes and cones with our 2022 robot. This worked better than expected.
Well better than expected until we tried to shoot the cube for the second time and cut the poor cube open in two spots. There is a vex double pulley on the cargo delivery subsystem of the 2022 robot, these flanges are a little too sharp for the cubes. I guess we know more about cube durability now!
The horizontal rollers didn’t work as well for the cones. The compliant wheels had enough grip but the current configuration doesn’t connect with the cone geometry well.
We managed to start putting together a few different intake prototypes but only had time to test the vertical roller intake today. The prototype was tested on cones and cubes with out any reconfiguration.


MKi4 Swerve Testing
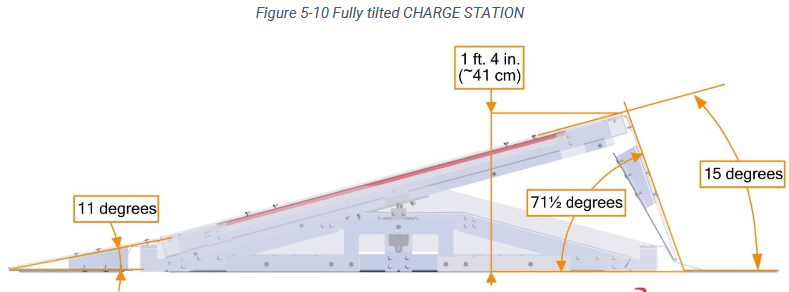
The next item we tested was the ability of our MKi4 drive base to drive up a 15° incline, a stand in for a tilted charge station.
Our swerve drive test bed is a 24″ square currently with out any bumpers. The first two tests we drove up and then let off the controls, the drive motors were in coast mode.
We changed the drive motors to brake mode and tried again, this was better but we still slide down. The next thing we tried was turning the wheels 90°.
With the wheels turned 90° the robot didn’t slide down the ramp. We even tried pushing it and it took a surprising amount of force to get it to move. The test bed currently doesn’t weigh a lot, adding weight should increase the traction. Hopefully we don’t have create any center of gravity problems.
Our next meeting is on Tuesday, we are ordering more metal, poly carbonate and will hopefully make progress on the wooden grids before then.

Leave a comment