
The day started by reviewing our Must Do, Could, and Won’t Do list. We added one item to the could do list. We must signal to the human player which game piece to introduce to the field. I think we should add a speaker to the robot and play a happy noise if the human player enters the correct game piece quick enough and a sad noise if they enter the wrong one or distracted.
Prototyping
Overnight we printed a big 10″ TPU flexible wheel to try and test with the cone. The thought was a big wheel would be able to compress more and intake a cone from the square side or narrow end. What we experienced was that the TPU doesn’t have enough grip to pull the cone in. It is possible to increase the grip by adding double sided tape, but we’ve set this prototype aside for now.
We were inspired by Team 4481’s weed wacker concept and attempted to iterate on it today. They have a passive bar to stand the cone up afterwards, we aren’t interested in standing the cone up so we skipped that part. A single weed wacker kind of worked for us. Looking back at this we were testing on concrete and not field carpet so that might have been a problem.
Inspired by the decent performance of this we added another weed wacker and shortened the length of tread. This was the most promising results we’ve had so far. The cone was ending up mostly centered and facing the same direction.



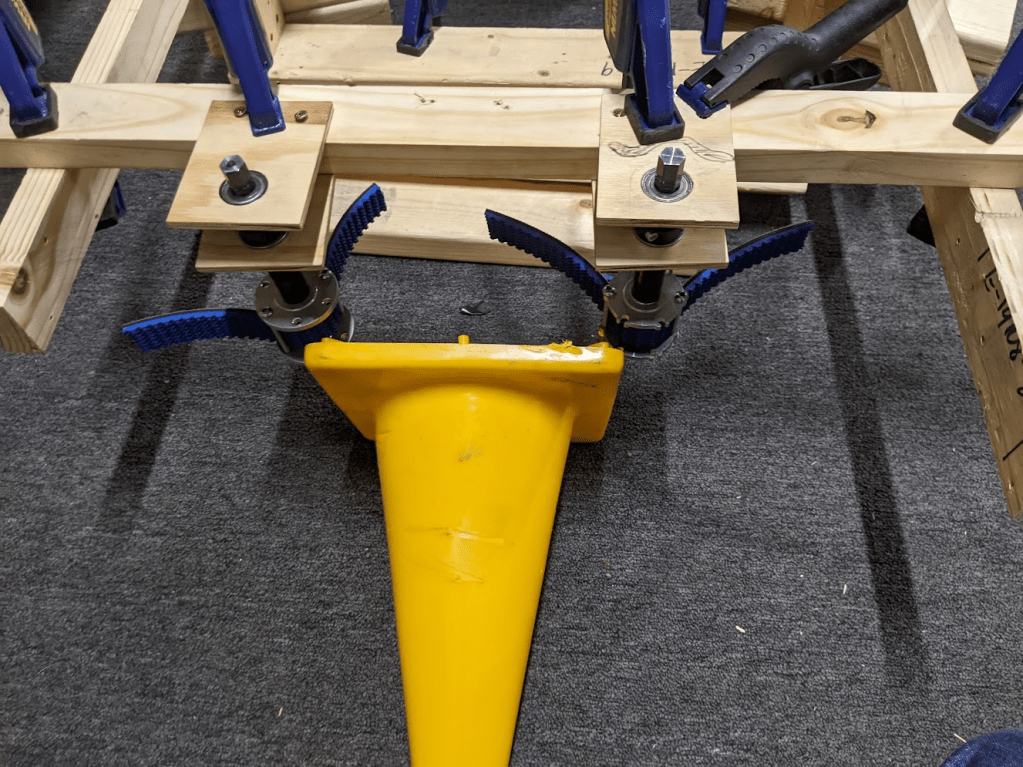
After inspecting the cone and the prototype we noticed the base of the cone actually hits the hub of each weed wacker. So we’d like to try spacing them further apart and adding longer tread to increase the reach. If that goes well this prototype might get further refined.
Field Build
Today one of the cone sections of the grid was finished! The remaining 2 x 4 pieces were cut and organized. They are waiting on the final router pieces to get cut to be able to finish the entire alliance grid.


Leave a comment