
Team Recap
Every week on Tuesday we start off with a team recap, where each sub team lead presents what was worked on the previous week. You can find our recap slides here.
Field Build
The assembly of the first grid started today. We have revised our timeline of assembly, we aim to the alliance grid completed by Saturday. Today our new laser diode for our fiber laser arrived. We successfully cut 1/8″ aluminum as a test to see if we are be able use the fiber laser for the charge station parts. Yesterday we figured out how to flatten the field parts from Onshape and export them to a .dxf.
Our sheet metal brake isn’t rated for some of the longer bends at 1/8″ aluminum so we will be adding some relief slots along the bend line which will make the bend easier. The timeline for completion of the full charge station is being revised to having it done two weeks from now. The initial estimate of a week was far too optimistic for the amount of work it is to build the charging station. I really need to start doubling my original time estimates.

Prototyping
Today our prototyping groups regrouped and split into three refocused groups, intake, buddy climb, and arm. The buddy climb got right into work by having a mentor sit on our swerve drive robot? Wait what? I don’t recommend sitting on a robot, lets keep this to a stupid mentor trick.

It was a simple and quick way to add 180 lbs to the swerve buddy climb test. On the far side of the robot are two forks which are holding up our kit bot. We wanted to know if we would be able to drive up the 15 degree charging station with the additional weight.
Cone prototyping continued to find a bunch of different things that don’t work well for intaking cones on the floor. We tried a bunch of different configurations of wheels and compression with an overhead roller. The big 8.5″ grey wheel put a few cuts into the cone.
With out much success on our single overhead roller we assembled a version of a top and bottom roller we found from Ri3D Redux Team. This worked better, but we haven’t figured out a good way to index or control the cone once its in the robot. This prototype had the added bonus of working with the cube.
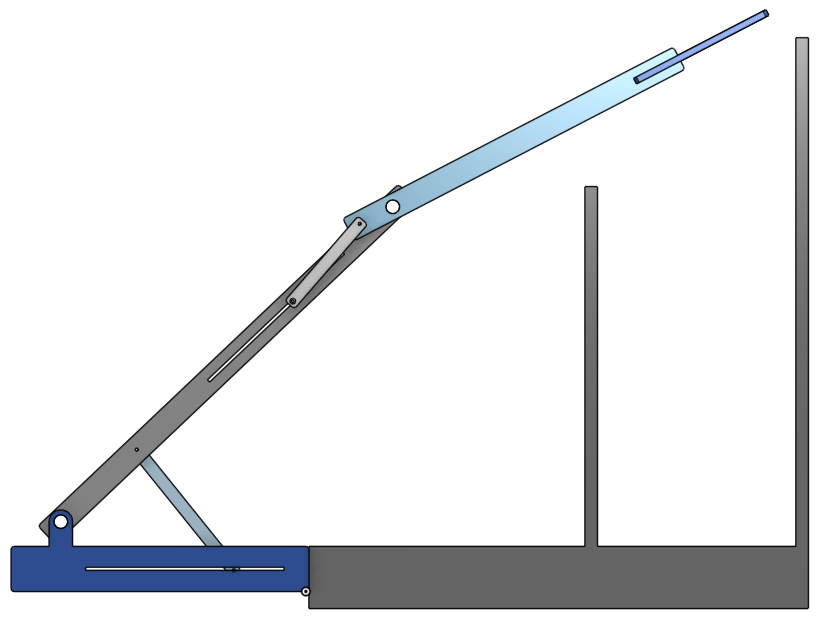
The arm prototype group started their prototyping journey with some sketches in CAD. These were used to prove that the geometry of an multi jointed arm would be able to reach the scoring areas and fit inside the robot’s frame perimeter. Then they used these sketches to make parts for a wood prototype which will be cut on the CNC router.
Driver Practice
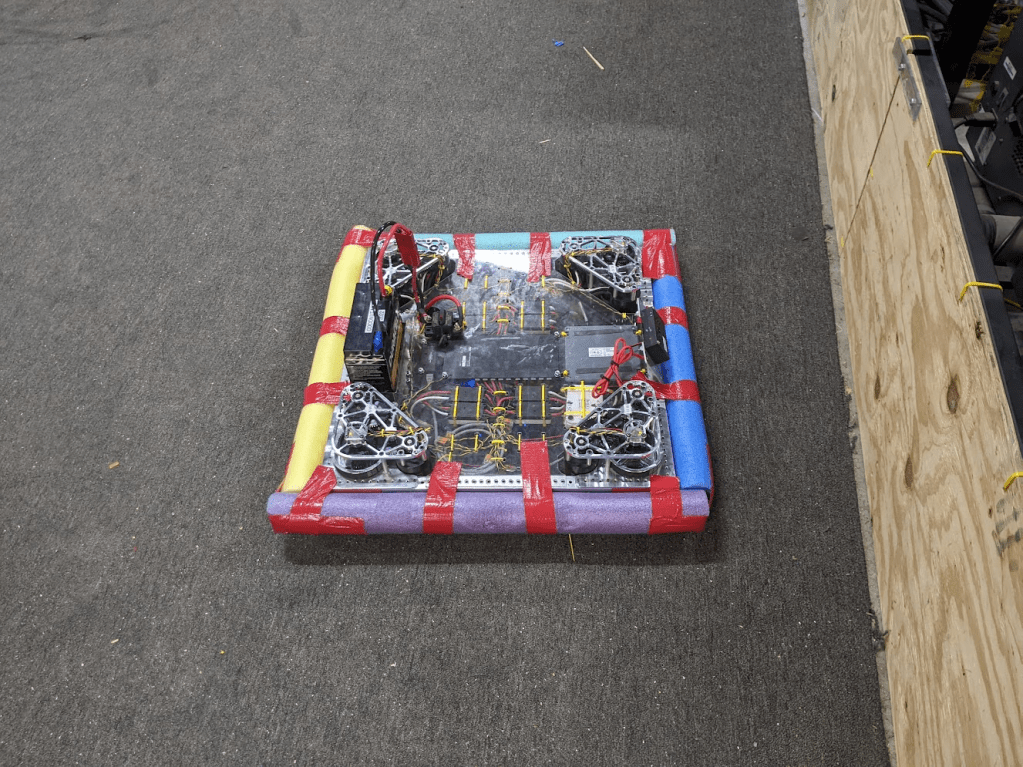
Tonight was our first build season driver practice session, also the first real practice session with our swerve drive base. Back in November I talked about our driver practice plan, which if all goes well we aim to hit 100 hours of drive practice by Worlds. We had a small problem at the start, our swerve drive base still didn’t have any bumpers, enter some pool noodles and duct tape and we have some quick protection.
Today’s session was trying to get our drivers more familiar with swerve and how to drive it well. We did two courses today, a figure eight and a square with a plus(see the below gif). We are trying to encourage the drivers to think more like swerve and less like tank drive.


Leave a comment