
Prototyping and Testing
It was a day dedicated to testing and assembly of prototypes! Which is great because that means we are learning what works and what doesn’t work. Today we assembled the 2 jointed arm prototype to prove that the geometry works. It is just able to reach the high goal it will get a little longer reach to more easily reach the high goal.




Next we spent more time testing the weed wackers. One thing we observed with the weed wackers was the speed the chassis is moving relative to the speed the weed wackers are spinning matters a lot. If the chassis is moving too quickly the cone doesn’t get enough hits to center or end up in the correct orientation.

Next we tested up right cones. This didn’t work great most of the work was done by the wood center beam. If we used this idea we’d have to have a passive bar ahead of the weed wackers to knock over the cones.


We also tested the cone against the field wall to see if we’d be able to intake it still. This worked better than expected the weed wackers were almost able to get the upright cones even. Once again chassis speed played a big role, if pushed too quickly the cone doesn’t end up in a repeatable location.



To end the testing before we started trying to improve them we tested weed wackers with the cube. The results from this really surprised me. I’d expect the weed wacker to knock the cube away. But instead it pulled them into the center.


After the marathon of testing the weed wackers we set out to improve them. A basic cardboard funnel is being created and we are increasing the distance between the two axis’s.
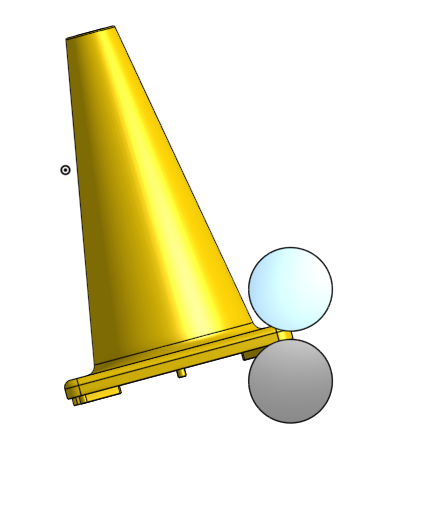
Another group started creating dual overhead rollers to test intaking of cones. After quickly clamping the prototype to a dolly we started testing the cones in different orientations.



After a few tests we noticed a failure to grab the cones sometimes. We ended up lowering the prototype so it was closer to the ground, this fixed the problem. The prototype handles the worse case of the edge of the cone being perpendicular to the overhead rollers amazingly.

In the current configuration this prototype doesn’t work with cubes. There isn’t enough compression between the two rollers. We will be increasing the compression and testing again on Saturday.

This prototype worked amazingly well. It isn’t as sensitive to the chassis speed. It does however leave the cones facing front or back and any where along the length of the intake rollers.
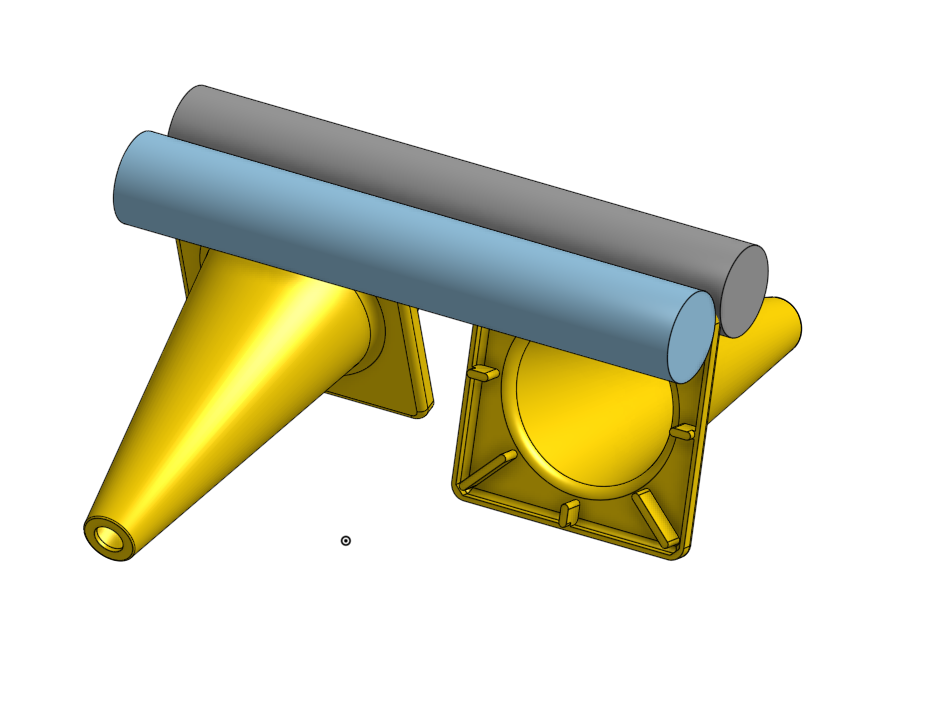
In order to score the cone we need to put the bottom hole side of the cone onto the pole. With a single additional powered point of rotation on the dual over head rollers we can get the cone facing in a direction that allows us to score it.
The other problem to solve is how to handle the unknown position of the cone along the length of the rollers. The current plan is to add time of flight sensors used to detect which way the cone is facing and the location of the cone.
With the location and direction of the cone we can construct an offset to add to the robot’s pose(gathered from april tags or reflective tape) that will allow us to place the cone on the pole. The other thing that makes this possible is doing swerve drive, the robot can easily move in any direction and move to the required pose to score. For the first time in a while we are creating problems for software to solve instead of solving them other ways.
The current plan requires the dual overhead rollers to be placed on the arm. This will be an engineering challenge to make them robust and light enough. There also might be a way to make it work with out having the intake on the arm, we’ll investigate this idea more at our next meeting. Our next meeting is on Saturday we hope to finish out the alliance grid, start cutting charge stations parts, more testing and prototyping.

Leave a comment