
Prototyping
To start the meeting we started working down the list of improvements to try with the weed wackers. The prototype moved off the dolly and onto a kit bot with bumpers(some old bumpers that didn’t quiet fit but got convinced with a hammer). The first change was increasing the spacing between each axis and longer tread. This didn’t seem to change the dynamic at all which was good. The longer tread is a different style of tread which is significantly “floppier” it still worked but I think ideally we’d want to move back to the blue nitrile tread.


The next item on the list to test was adding a ramp. We played around with different ramp configurations but we couldn’t get any consistent results with two weed wackers. More weed wackers might push it up further or a less steep ramp might work better. This is probably as far as we’ll take the ramp idea.



The next idea that was tested was adding a bottom roller to see if that would help at all. We didn’t have a strong idea of what this would do but it was simple to try. The under roller makes everything less controlled and it looks like the robot is trying to juggle the cone. Don’t recommend.
Dual Over Head Rollers
The dual over head rollers got the space between the compliant wheels reduced from .5″ to .25″. This allows us to grab the cube between the rollers. If the power on the drill is let off the cube pops back out. We were careful not to use full power because we didn’t want to harm another cube.

The next iteration of the dual overhead rollers had great progress made today. This iteration uses two PVC rollers repurposed from our 2020 robot. Not even winning robots are spared from prototyping(it’ll get put back together once we learn from the rollers). This version also has two motors and the pivot that allows it to rotate 90 degrees in both directions. We worked on this a good portion of the day and I forgot to grab any pictures of it. You’ll have to wait until tomorrow to see it I guess.
The next idea comes from a reader of our build blog who messaged me and I’d like to thank them for it!

Talking and showing our work in the open created this idea. I’m not sure we’d have come up with this idea on our own. The next thing we started testing was combining the weed wacker with the dual over head roller. The weed wacker will center the game object and the dual over head roller will grab and control it. Now instead of the cone being in 2 orientations and an unknown position it will be in one smaller location and one orientation.




This prototype worked amazingly well. I was surprised. It seems to be able to intake cones in any orientation. Chassis speed is still a slight concern because we are using drills and can’t increase the speed enough relative to the chassis speed. We’ll attempt to solve that on the next iteration of the prototype which will include motors, a change of spacing to fit in our frame size of 26″ x 26″, and it’ll be driveable!
There were a few odd failures that happened while testing. We hope the next iteration will be much more consistent with motors powering everything and increased rigidity. I’d also love to test the difference the stiffer blue nitrile tread makes.

Want Your Own Weed Wacker?
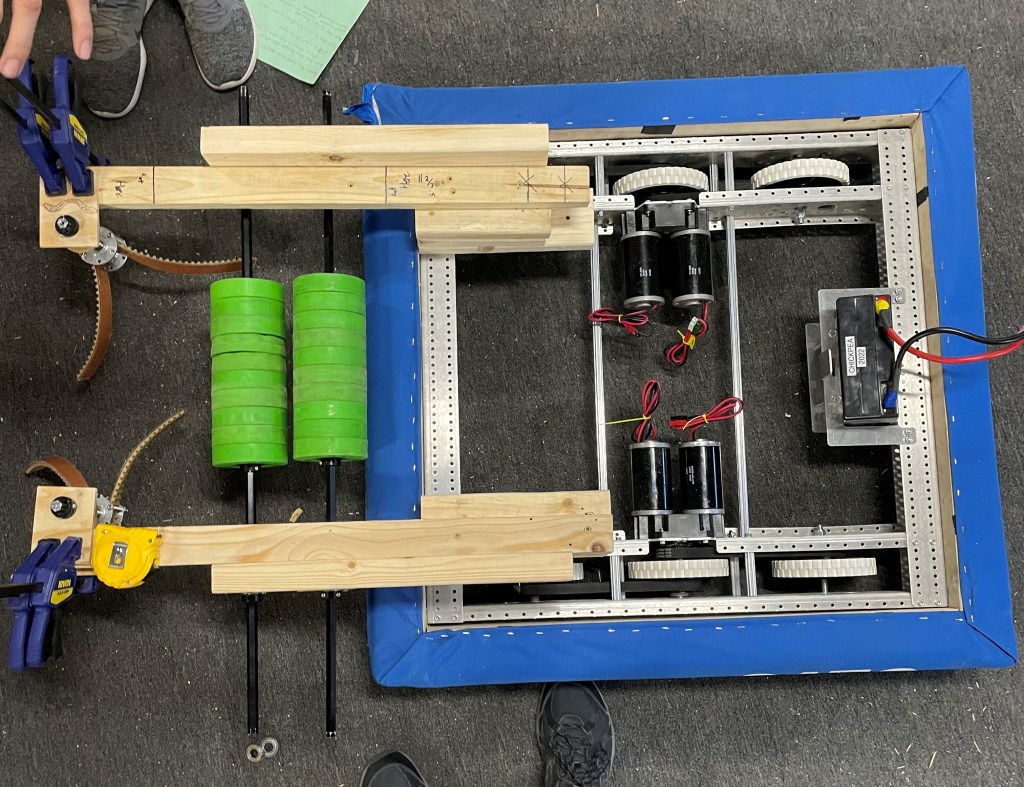
If you’d like to join team weed wacker I have some measurements taken from our prototype that you can use to start your journey. These numbers aren’t perfect and I can’t guarantee what you will build will match the results we’ve had. As always you need to do your own testing, debugging and improvements! Let me know if you need any other measurements and I can grab them at the next meeting.
Dual Over Header Rollers
- 4″ diameter 1″ wide Green Compliant Wheels 10 per axle(need two axles)
- Floor to center of axle 9″
- Axles spaced 4.5″ apart
- Distance between first roller and weed wacker 9″
- Back roller was 5″ from the kit bot frame
- Rollers are 10″ wide
Weed Wacker
- Arm 17″ from bumper (20″ from kitbot frame)
- 11.5″ from floor to top bearing plate of weed wacker
- Weed wackers spaced 15″ center to center
- Bottom of weed wacker’s hub is 6″ from the ground.
Hub assembly
- Hex shaft 8″ or so
- 2 hex hubs
- 10 – 32 bolts and nuts to hold the hubs together
- 13″ of 1″ tread(blue nitrile seemed to be less floppy and possibly better)

Field Build
Our laser cut actual charging station parts today! We had to kick everyone out of the shop for an hour so we lost a bit of productivity but that’s fine. We cut the first of three sheets of 1/8″ aluminum for the charging station build. The next two sheets will hopefully be cut on Monday. We also completed our first grid section today. The other two sections have all of the pieces cut and just need to be assembled now. CAD for the frame rails was released today and the stock was cut down to size. Our frame dimensions ended up being 26″ x 26″.



Leave a comment