
Today we tested the 2″ compliant wheels in the dual overhead roller. The durometer of the wheels didn’t seem to make much of a difference. The left side has 60A compliant wheels while the right side is a variety of softer ones.


This intake worked well enough that we’ll be making the first refined version of it in CAD. This intake doesn’t pick up cones that are tip pointing into the robot. So for the first version we’ll have 180 degrees of cone acquisition zone, and we’ll force our driver to position the intake in way that works. Its not ideal but cones have stumped us for a while and our first competition is in 29 days.
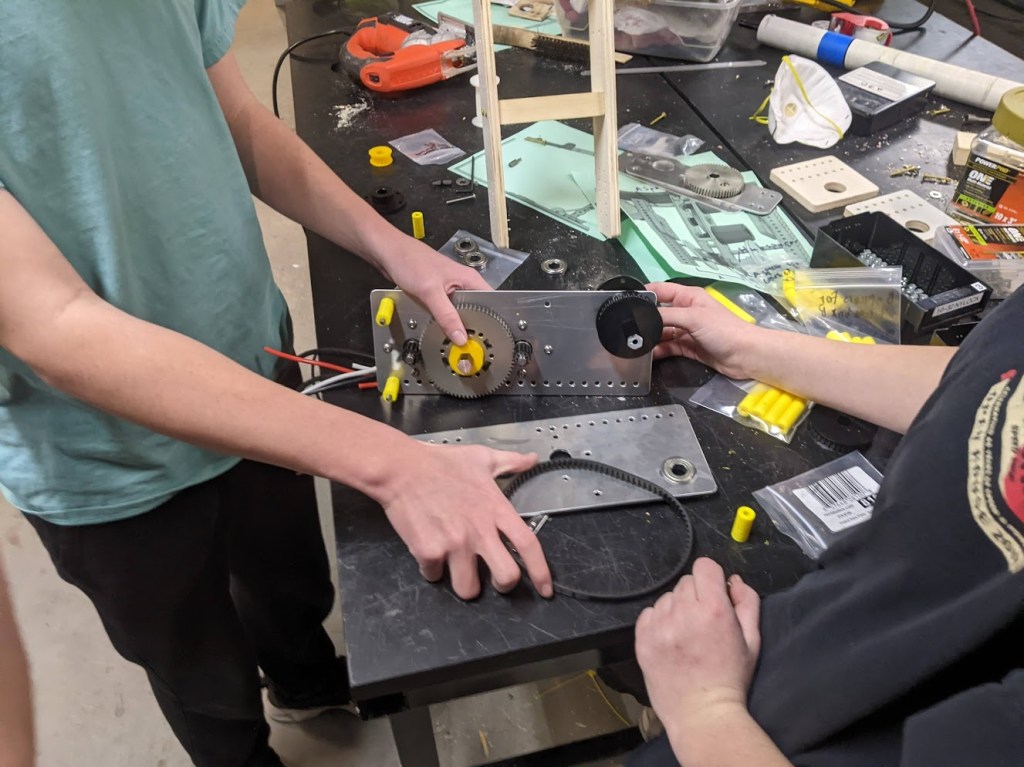
The CNC laser made it’s first robot parts today. The arm gear box plates where both cut out. Gears in our shop were mislabeled with the wrong tooth count. That became a problem when we put it all together. Fortunately we managed to find a combination of gears that we had on hand and will still work with the current gearbox plate.
Saturday is looking like it will be a productive day, the competition robot is almost done with wiring. The arm gearbox and the wood arm are ready to be installed on the robot. The everybot intake plates have been cut on the router and are ready to be assembled. A lot to do, check back after Saturday to see the results!

Leave a comment