
Intake prototype team wrapped up with a final few tests today. We wanted to see if we could use spacers on the dual over head rollers to reduce the quantity of compliant wheels. Turns out you can use 1/4″ spacers between each wheel. Attempting to use 1/2″ spacers didn’t work, the cone would get stuck between them(left .gif).

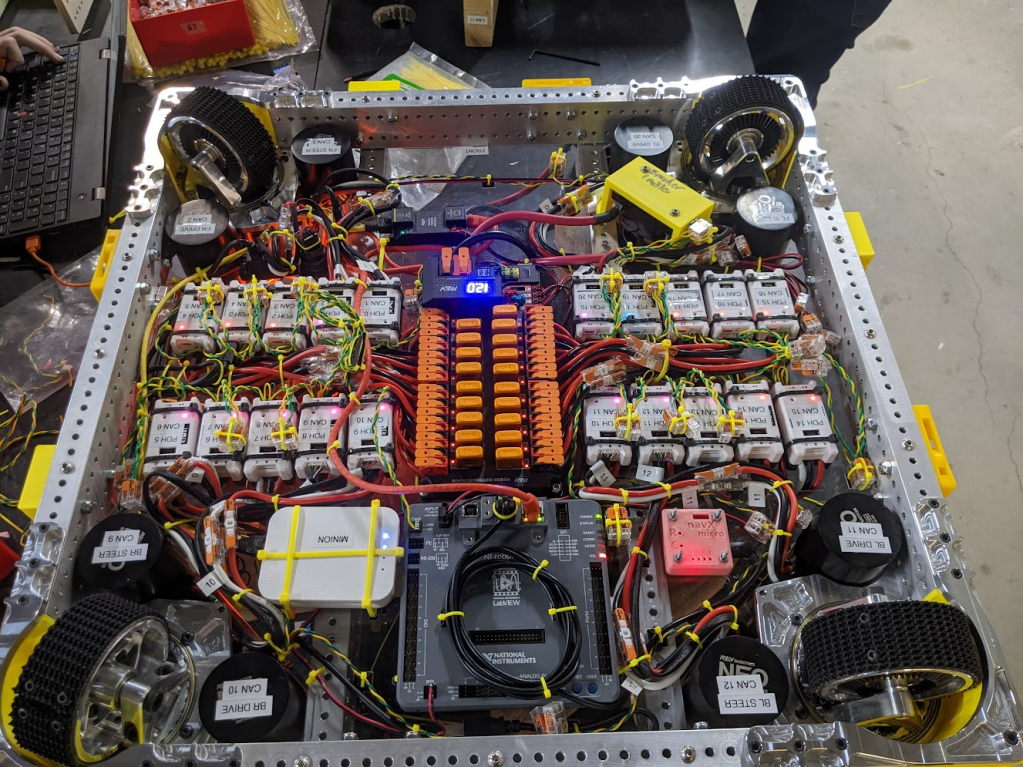
The rest of the assembly team made great progress today. The competition robot turned on for the first time, all the wiring is complete, and nothing started on fire! There are a few pieces of wiring that we need to clean up still, but its mostly there. The robot didn’t get to moving around today but we are close.
The modified everybot intake was also assembled. We made the intake narrower and cut the first version out of wood. Good news is that it all still works!
The practice bot got its frame spaced out to match the competition’s robot size of 26″ x 26″. We unbolted the frame from two of the swerve modules, moved it down an inch on each side and re bolted everything together. I love how easy it is to tweak the frame size with swerve.
Meanwhile the arm’s gearboxes were both assembled. The everybot intake was mounted to the arm. Next the whole assembly got bolted to the practice bot.


The arm needs a few tweaks and the rigging ran to the second joint. We 3D printed the first version of the gear box spacers. Those broke in a few seconds, next version will be aluminum. The geometry might need to be changed just slightly so the everybot intake fits nicely.

Leave a comment