
Its been a week since we’ve last posted, Austin and a large portion of Texas was coated in layer of ice and we lost all of our weekday meetings because school was cancelled. But we got to meet today, and it feels great to be back at robotics!
Prototype Arm
Last week we broke the spacers that mount the “choo choo” mechanism to the frame. These 3D printed spacers were reprinted with 5 wall count and 20% infill and replaced. The arm was also shuffled over to the competition robot because the practice bot doesn’t have enough motor controllers. After rigging the second stage, mounting two through bore encoders and wiring everything we turned the arm over to programming sub team.
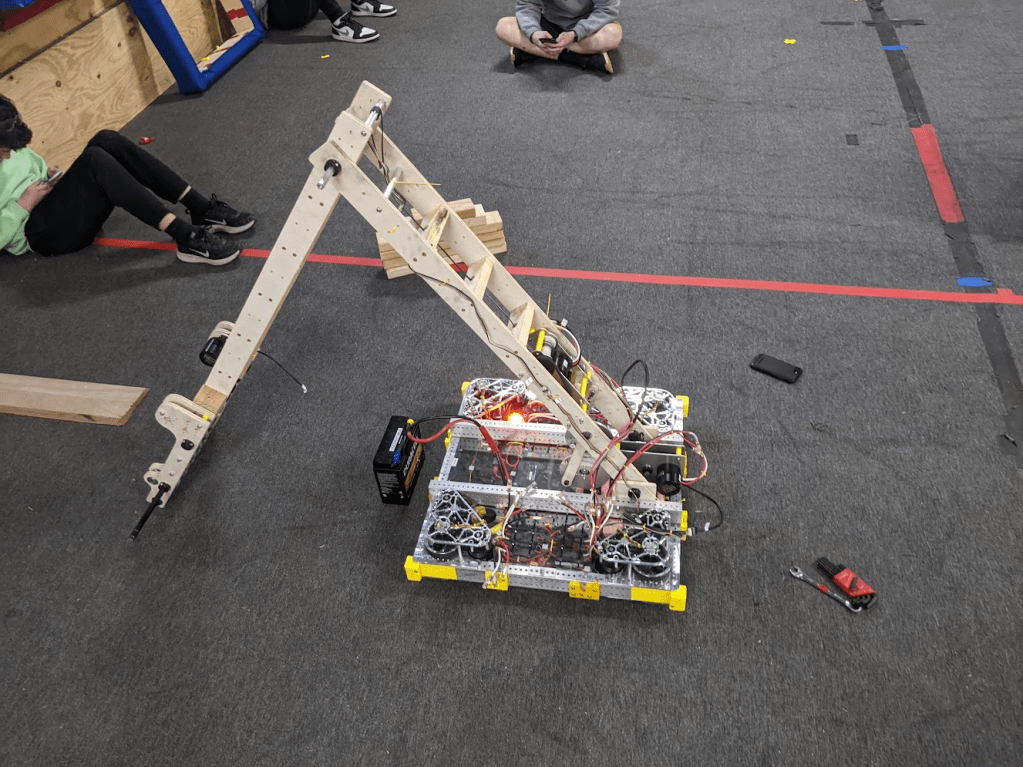
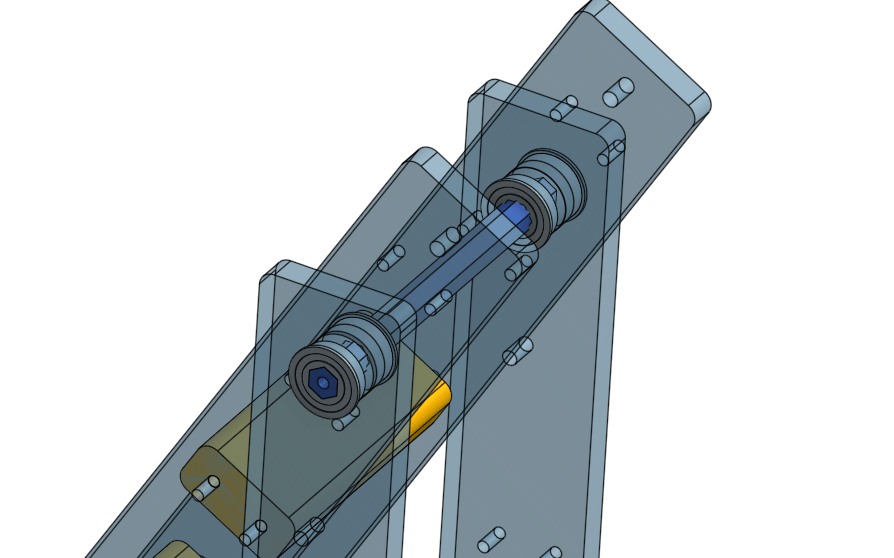
Then we spent an hour trying to figure out why the through bore encoders were not reading any changes in angle when either arm was rotated. Turns out there was nothing to lock the shaft to the first part of the arm. So when we moved the arm the shaft wasn’t spinning. The encoder locks the shaft to the second stage, but we didn’t have anything on the first stage. Whoops! We quickly screwed in a hex hub on both joints and got the encoder to report the correct values!
Charge Station Progress
Its been four weeks of work but today we finally got to see some results! The school thankfully didn’t lose power during the week so although we weren’t able to have a meeting we did manage to get 95% of the charge station parts cut on our fiber laser!

We dove right into bending all the parts on the sheet metal brake. Towards the end of the meeting we started assembly of the charge station and managed to get three of the pieces riveted together.

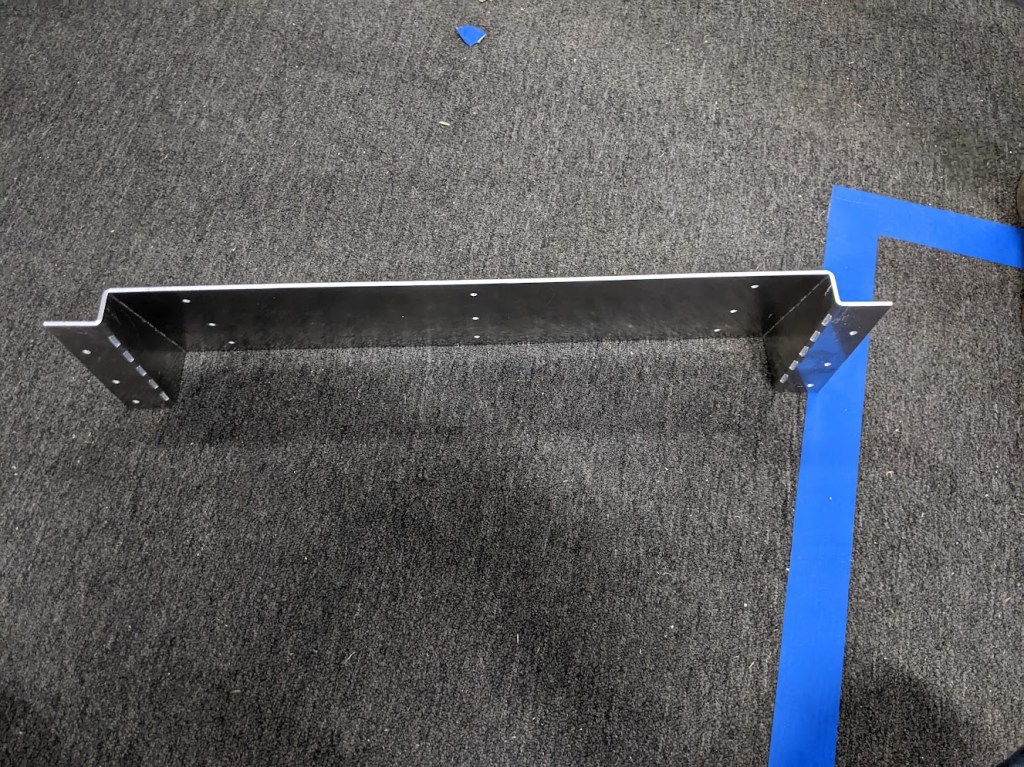
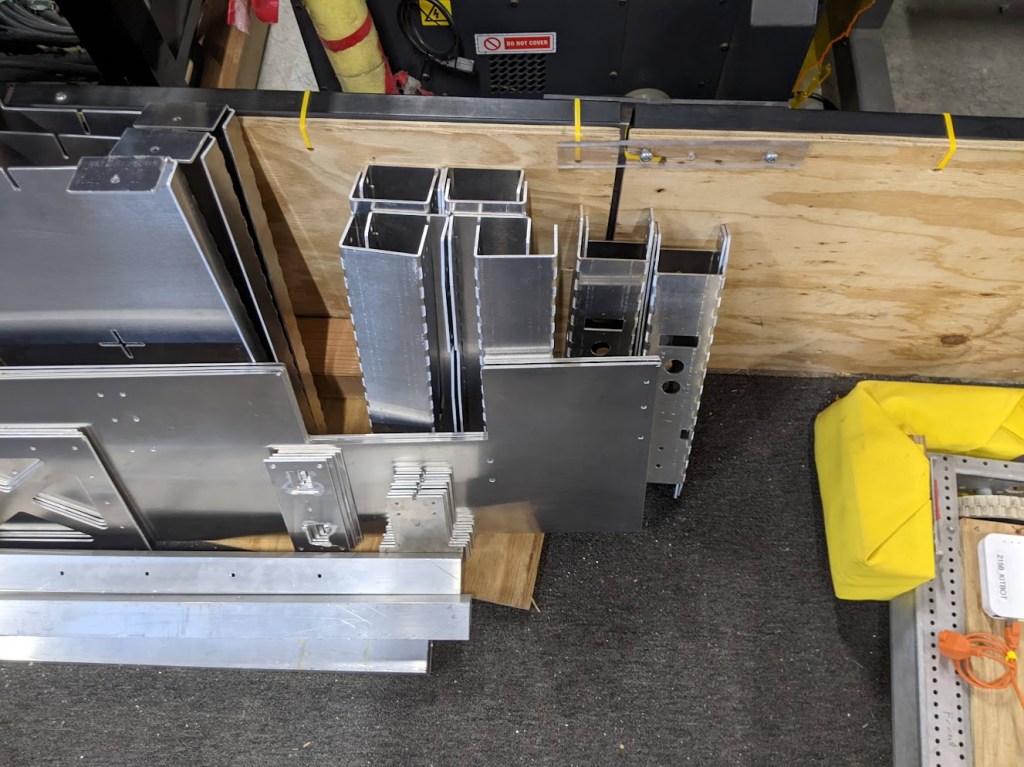
There are five missing pieces that need to get cut on the laser, four different pieces that need to get finished on the mill, and one piece that needs to get cut on the router. We are very close to having a charge station, we might be able to have half a charge station by the end of the day tomorrow!
Bumpers
Below are two gifs of our bumpers, one putting them on and one taking them off. We need to tighten(or rework the dove tail joint), it is currently only held on by one bolt and can get misaligned. Overall I’m very impressed with this mounting system, they go on super quickly, come off just as quick and there isn’t any hardware to lose.


Leave a comment