
Charge Station
It is finally done! Phew, that was a lot of work. It took double my initial estimated number of weeks. We learned a ton of stuff along the way and got to put our new fiber laser to use. It was our team’s first big project made out of bent metal. The charge station even has a tiny First Charge Up logo in the center, it is easily my favorite part.
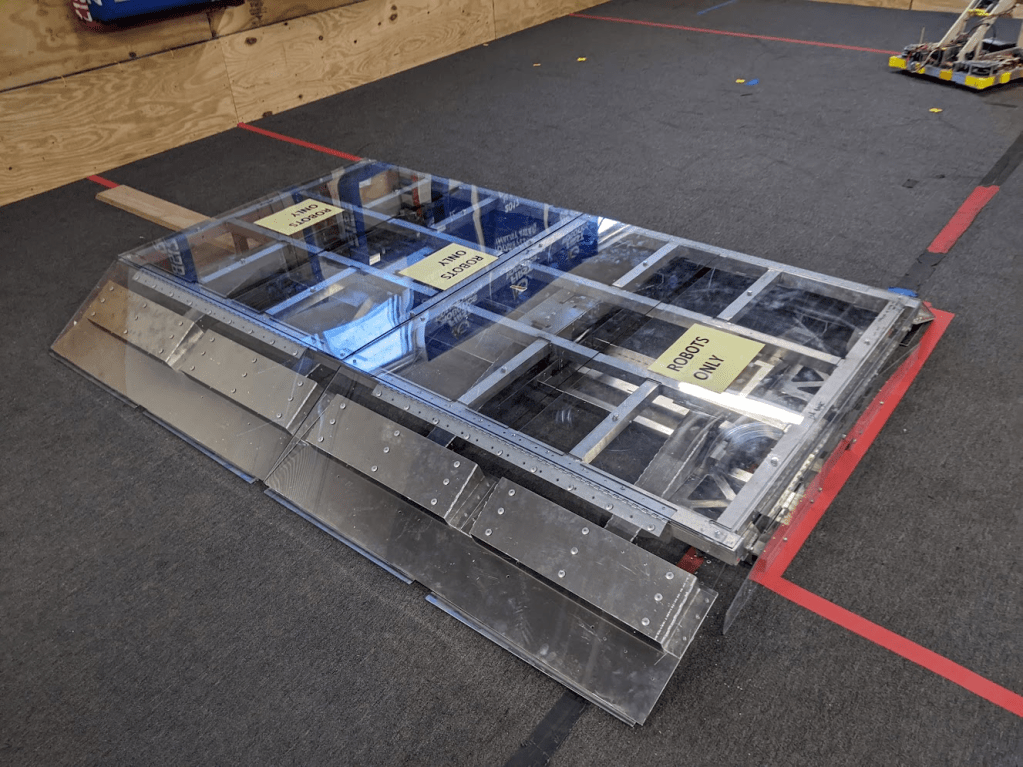
Just look at that little logo! Thanks Thrifty Bot for the sticker!
Charge Station Testing
With a complete charge station we set right off to driving stuff up it to see what happens. With bumpers and mki4’s we were easily able to drive up the charge station at surprisingly slow speeds.


The robot did manage to get beached twice. Once while driving up with a heavier partner and once while trying to drive off.

The robot in the tests is incredibly light. It is probably around 60lbs with bumper and battery. It’ll be interesting to see how the dynamic of the charge station with robot already on it changes when our robot is at the full weight. It’ll also be great fun to see what happens when we try our buddy carry on the real thing!
CAD
The CAD team pushed really hard today and manage to get the first version of CAD completed. They even managed to get all of the part drawings made and uploaded to Trello. Currently manufacturing has 76 unique parts in to do, or in progress on Trello. A good number of those parts are router, laser or 3D printed parts so hopefully it doesn’t take too long to get them all made.
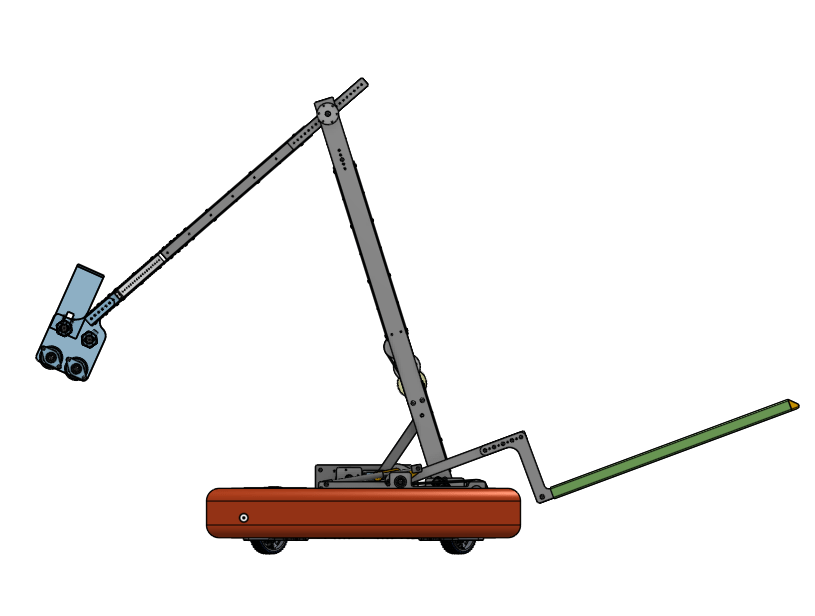
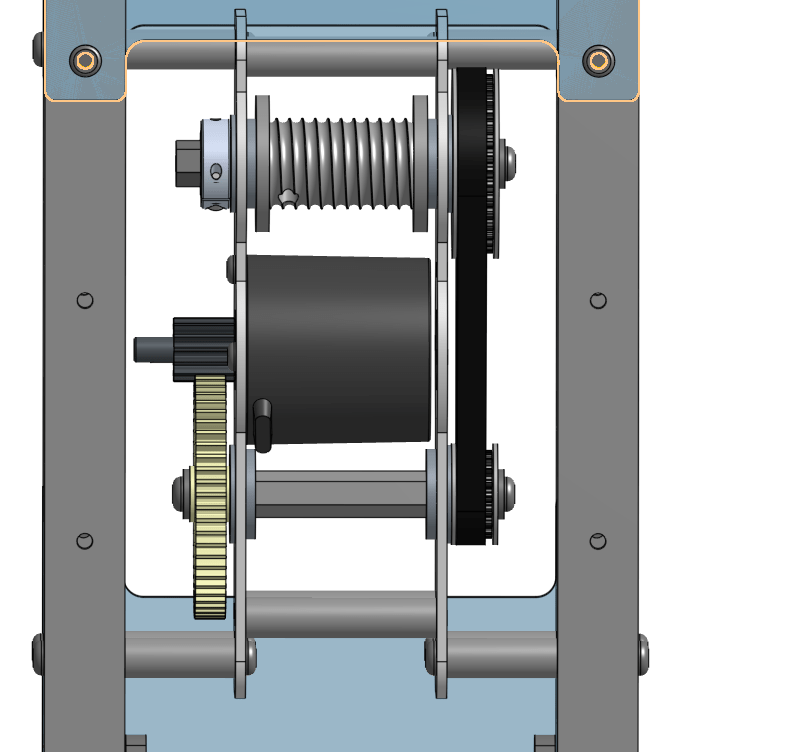
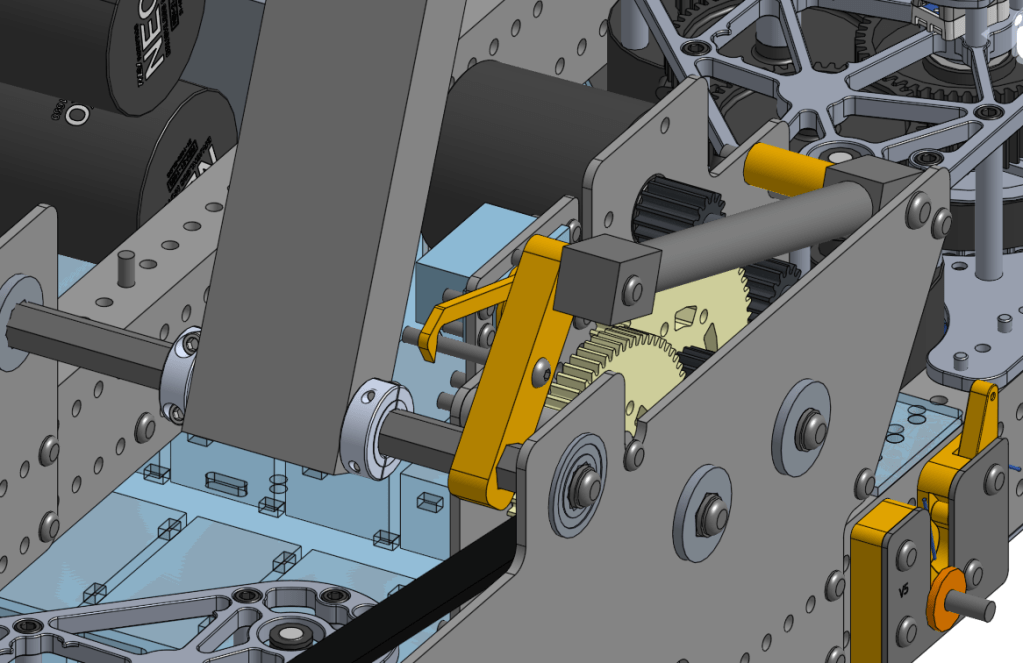
Arm
The arm has two joints, the base joint is powered by the “choochoo” (cranker rocker mechanism). The elbow joint is powered out by a winch and pulley combination. The inwards motion is passively powered down by gravity and possibly a constant force spring. By powering our arm’s joints in this combination we were able to keep all of the motors and gears for the arm low in our robot, improving our center of gravity.


Intake
The cone intake is a flange grabber style. The first version of the intake will only be doing cones, CAD will be working to make a cube add on in the up coming week. The intake is powered by two Neo 550s each on an ultra planetary(5:1 reduction).

Buddy Carry
The buddy carry’s biggest change from last time is the change from .5″ aluminum plate to 2 x 1 and .25″ plate to the carbon fiber forks. This change makes it easier and cheaper to manufacture, additionally we can now iterate on the individual parts if needed.

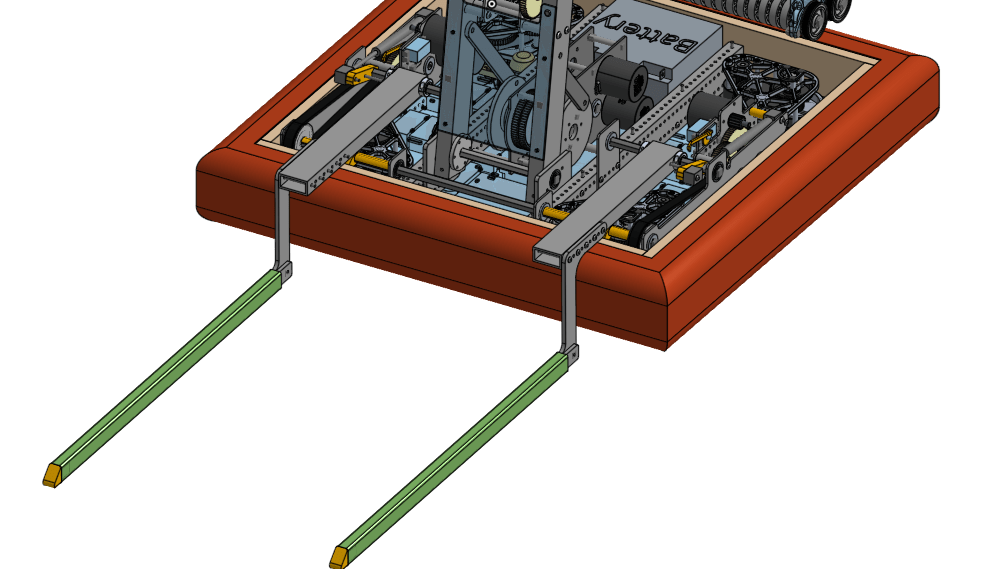
There was some rework done to the mounting of servo release mechanism, the servo now has a plate that mounts to the gear box instead of the entire thing built into the main gear box.
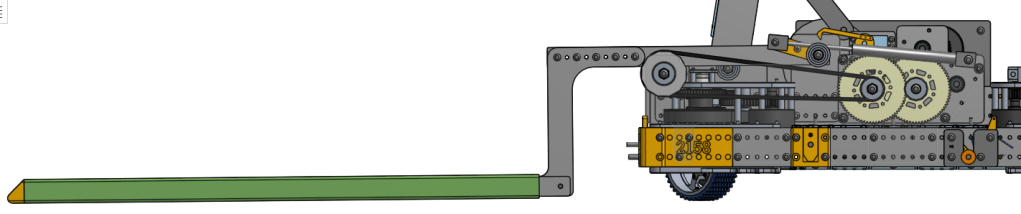
Robot V1

So there it is, our first version of this year’s robot. It’ll be a mad rush to manufacture everything next week. Hopefully we’ll be able to assemble it quickly and jump into testing code, refining autonomous and driver practice.

Leave a comment