
With the majority of the parts manufactured the team started assembling the arm on the competition robot. The few missing parts were quickly turned out and the arm was completely assembled. We didn’t run into any problems during assembly which is great.
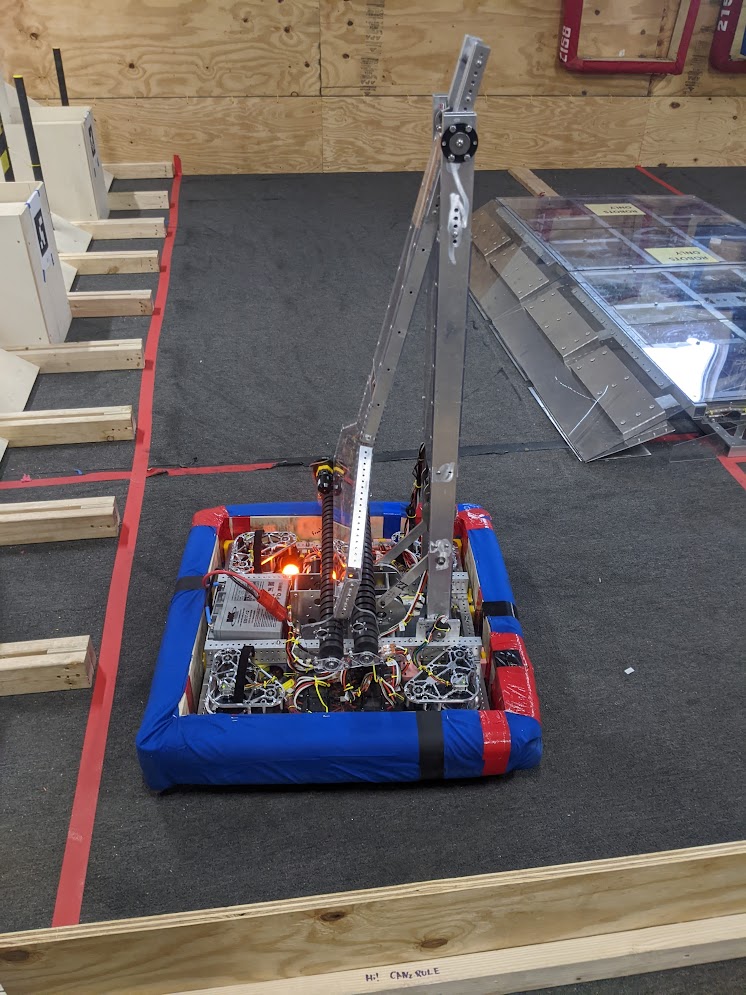
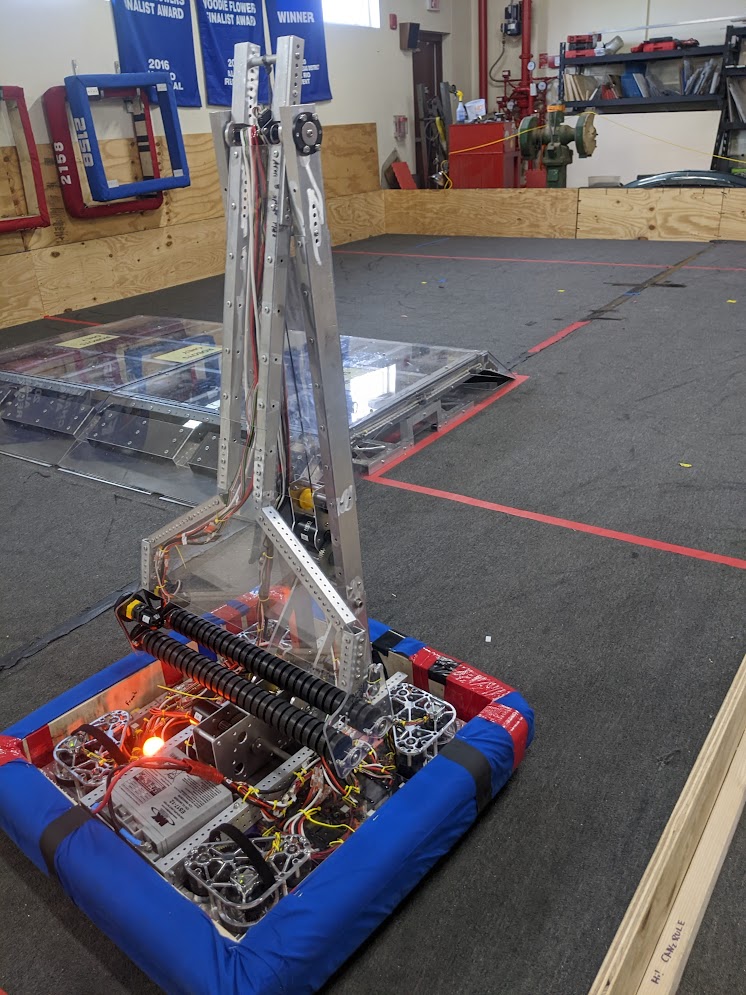
After assembly the first thing we did was head over to the scale, the robot with the arm and intake weighs in at 79.4 lbs. Plenty of weight left for the buddy carry. After the scale we turned the robot over to programming to start testing their code.
While the arm was being worked on the buddy carry gearboxes were also being assembled. We are missing some metal double wide pulleys so we used 3D printed ones for initial assembly. 3D printed pulleys are great for low torque applications, but our buddy carry doesn’t exactly fit that, we’ll end up replacing these when the metal ones get in.
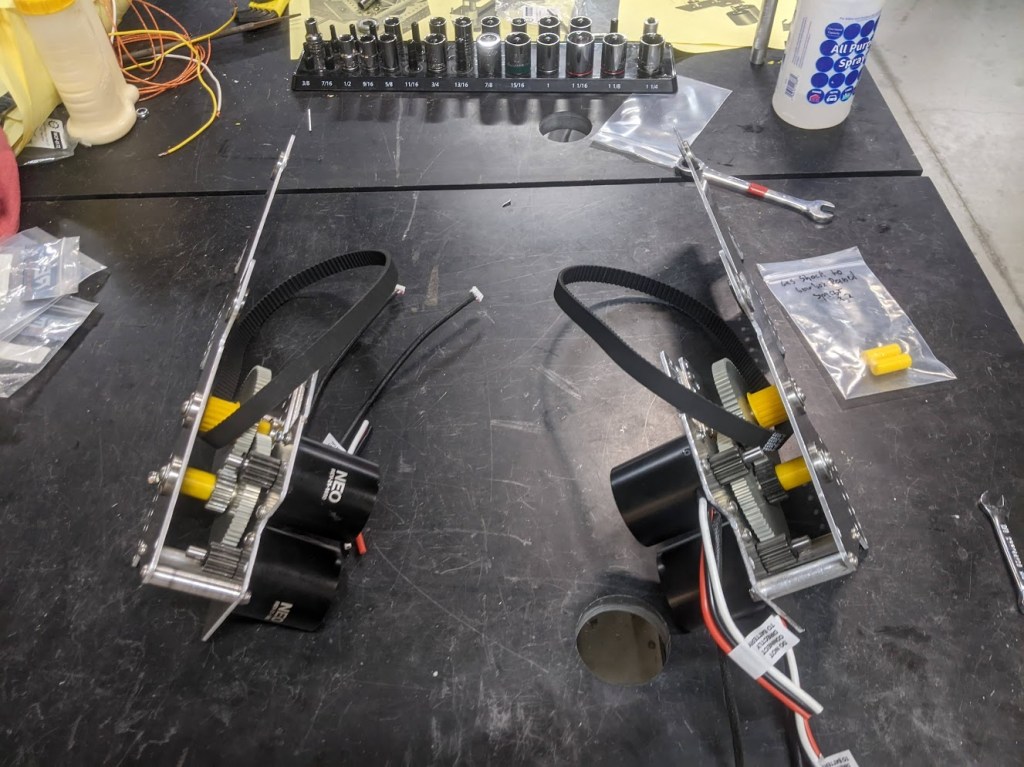
With the gearboxes ready to go Tomorrow we’ll mount the rest of the buddy carry to the practice robot and start testing with it.
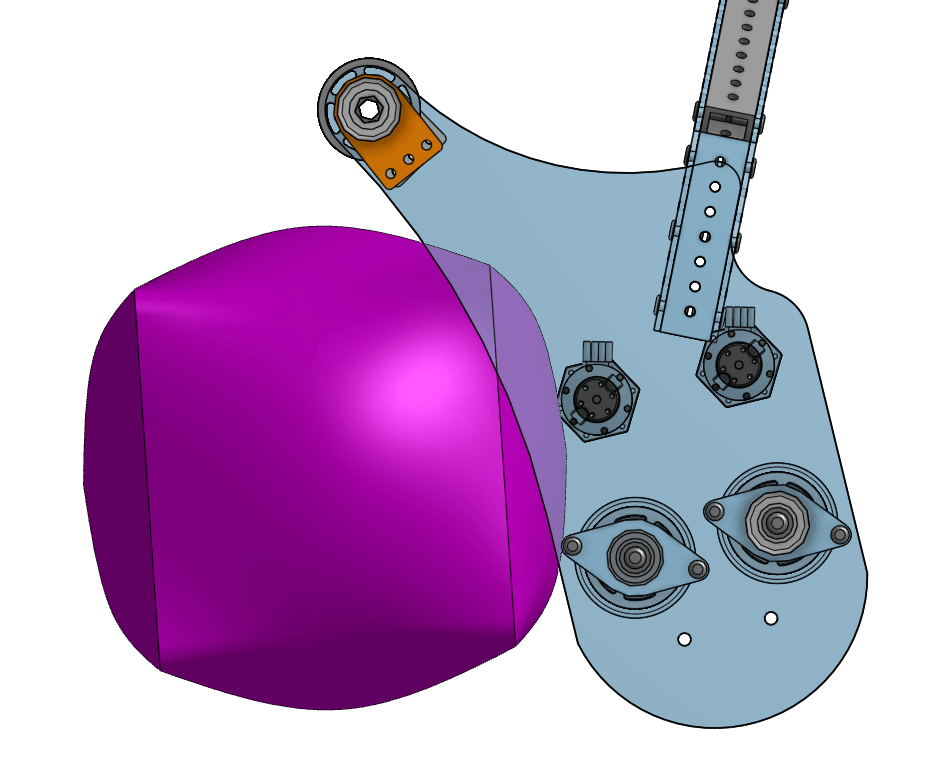
With all the parts complete for one robot we have started releasing the next set of parts, everything required to put an intake and arm on the practice bot. There is one small improvement for the arm, we are extending a hex shaft on the “choochoo” gearbox we we can drive it with a 1/2″ wrench. This would allow us to easily reset after a match. The intake has a two big things we want to add to it, cubes and a time of flight sensor. We are waiting for those modifications before we release the intake to make again.

Leave a comment