
The buddy carry is slowly getting assembled. We’ve been finding a small thing wrong, releasing a fix and finding the next thing to fix. The 40 upgraded metal cam plates all got cut tonight and just need to be de burred. During assembly we found out the 3D printed mount for the gas shock wasn’t strong enough. This will need another revision to fix.
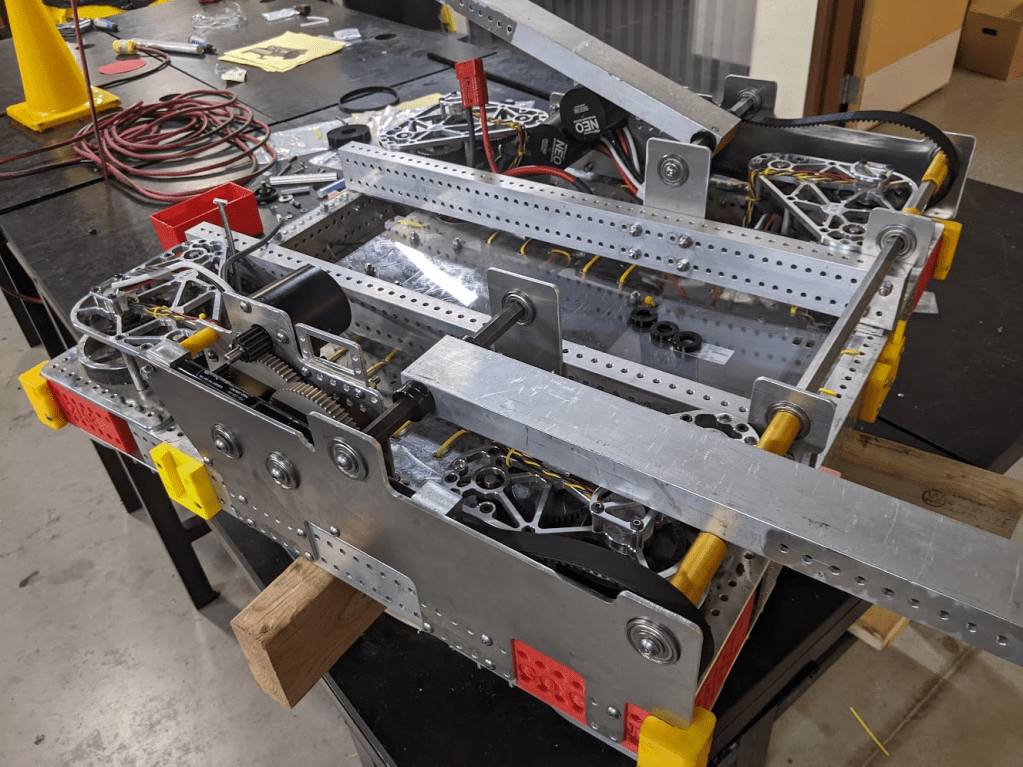
We are using broken hockey sticks which we recycle from an ice rink for the forks on the buddy carry. Tonight these were cut down to size and hot glued into the aluminum brackets. Each fork weighs in a 0.8lbs.

Our programming team has been in the shop every day since Saturday when we turned the robot over to them to program the arm. We’ve fixed the inverse kinematics that is used for positioning the arm. Next we are working on moving to a profiled PID controller which will help the arm move more smoothly. The below gif is one of the first tests of the arm running on simple closed loop control.
After moving to profiled PID controller we have to make commands that move the arm to the intake, mid scoring, high scoring, substation shelf and stowed positions. Then the real driver testing can start.
Once we were able to hold the arm in a position we tested the intake while mounted on the arm. The intake didn’t seem to loose any of the performance from our prototype testing. In the next few days we’ll test the intake a bunch more.

We spent the final part of the meeting driving around with our intake and arm in the stowed position. We drove over the cable protector and the charge station at different speeds. Our center of gravity is low and the robot is very stable while traversing the field.

Leave a comment