
On the programming side of things we switched the arm over to a profiled PID controllers. The has made the arm move significantly smoother. We still have to spend more time increasing the speed and tuning PID values.

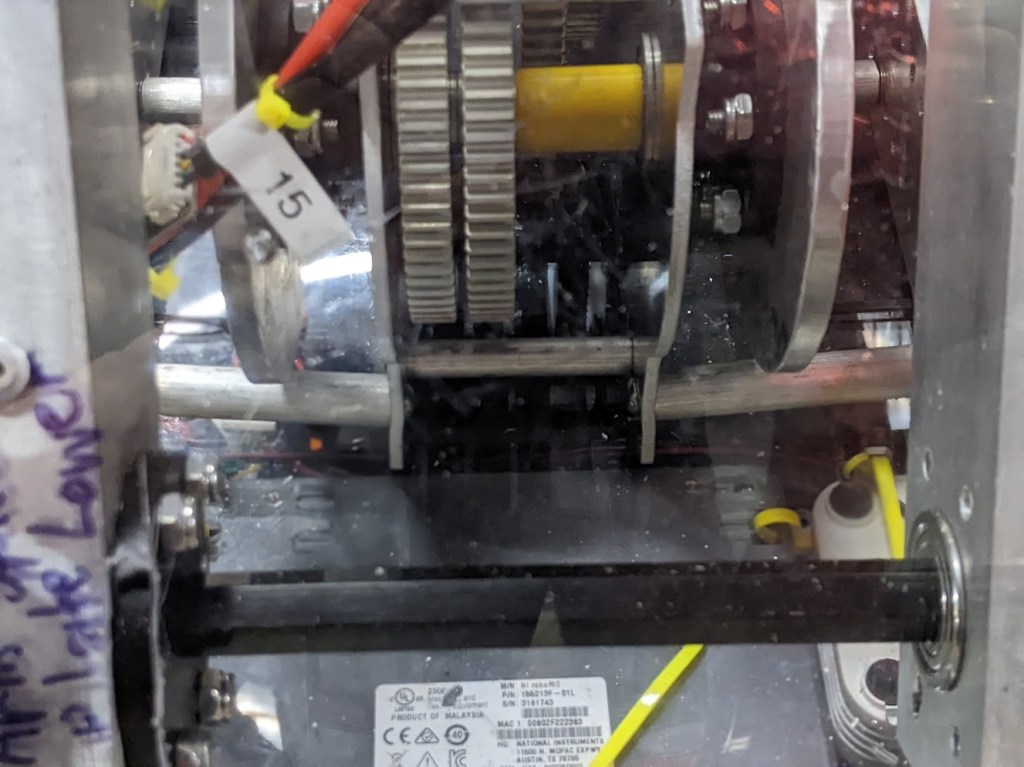
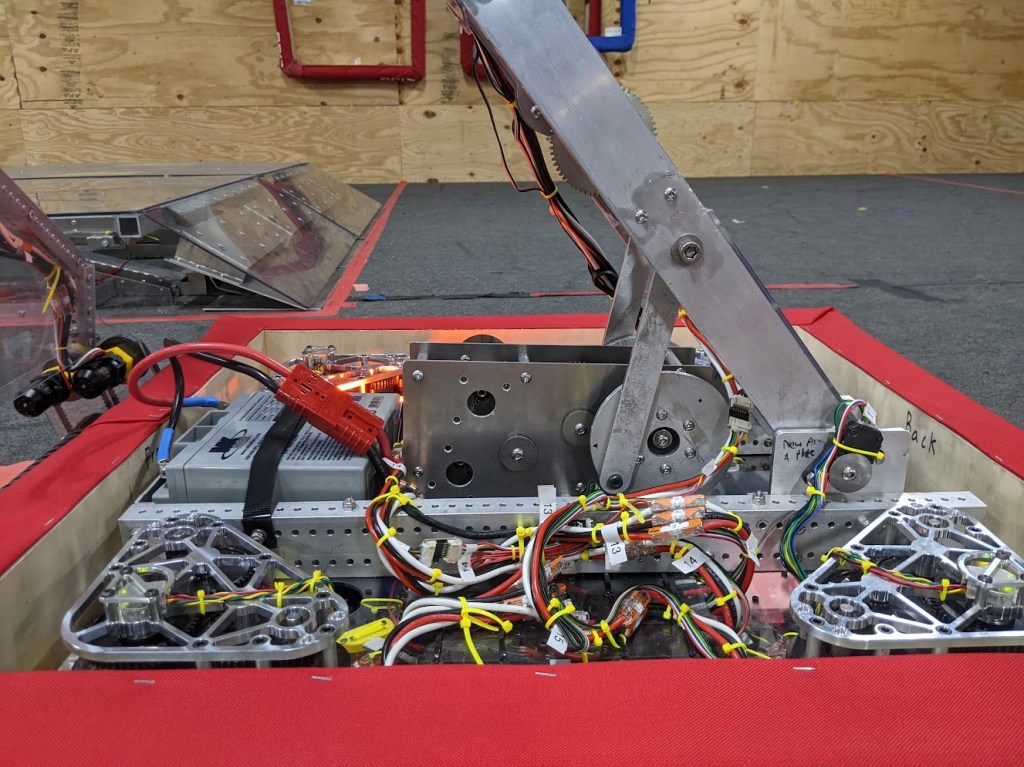
The base joint movement is the slow part of the process right now and eventually we can speed it up a lot more but the gear box is slowly self destructing right now. The arm is a really long lever and the choochoo linkage and wheel take all of the upward and downward force straight into the gear box.
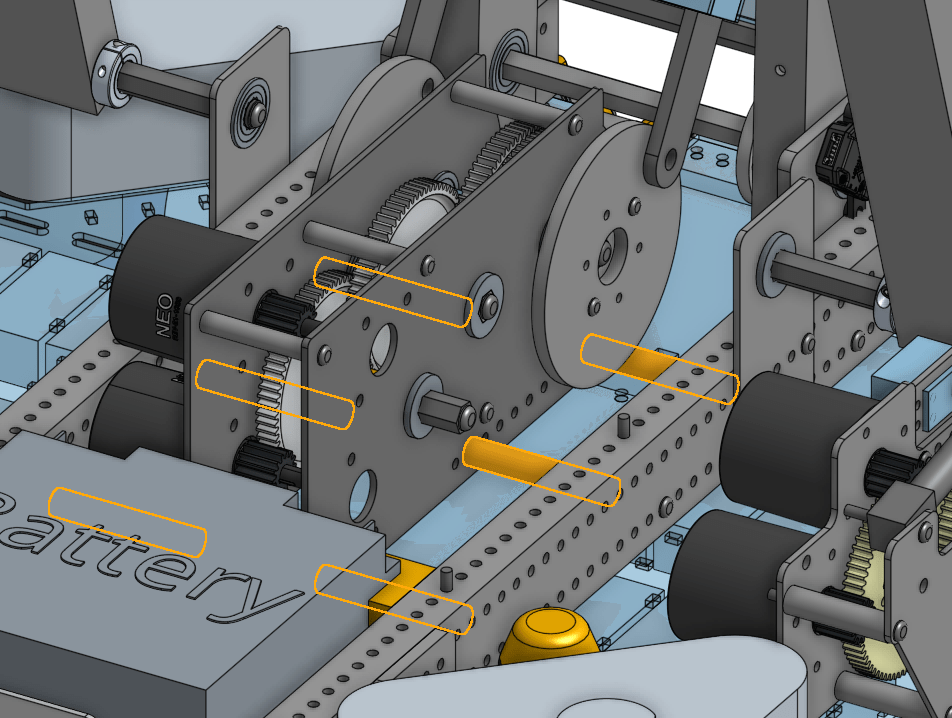
The choochoo gearbox is currently supported by 6 stand offs, 3 on each side. The point where the plates and standoffs connect is slowly deforming and bending. As a result the choochoo gear box has developed a bit of a slant.
For a quick temporary fix we’ll be adding in double the number of stand offs along the bottom. I expect this will buy us a day or two of testing at most. Tomorrow night CAD will be redesigning the gearbox to better handle the forces from the arm.
The buddy carry had a big setback today, the belt to the cam shaft has the wrong center to center distance. So that big plate will need to be re cut and everything moved over. The blocks that mount the gas shock had the wrong tap call out so those parts also need to get remade. I’m not sure if the buddy carry will end up on the robot in time for Waco.
Cubes?
The CAD team released the next iteration of the intake tonight. It has a top PVC roller that will be able to intake cubes. The double jointed arm is able to bring the top roller low enough that we’ll be able to intake cubes from the ground. This version also adds two time of flight sensors that we can use to detect if we have a game piece.

The new version of the intake needs 2 shafts, 6 3D printed parts, and 2 plates made. We will easily be able to get this on the robot before Saturday. If testing goes well we should be able to pick up cubes in time for Waco.

Leave a comment