
The gearbox for the arm was reinforced by adding doubling the number of standoffs by the choochoo wheel. This made the gearbox super rigid and it doesn’t flex when the arm extends any more.
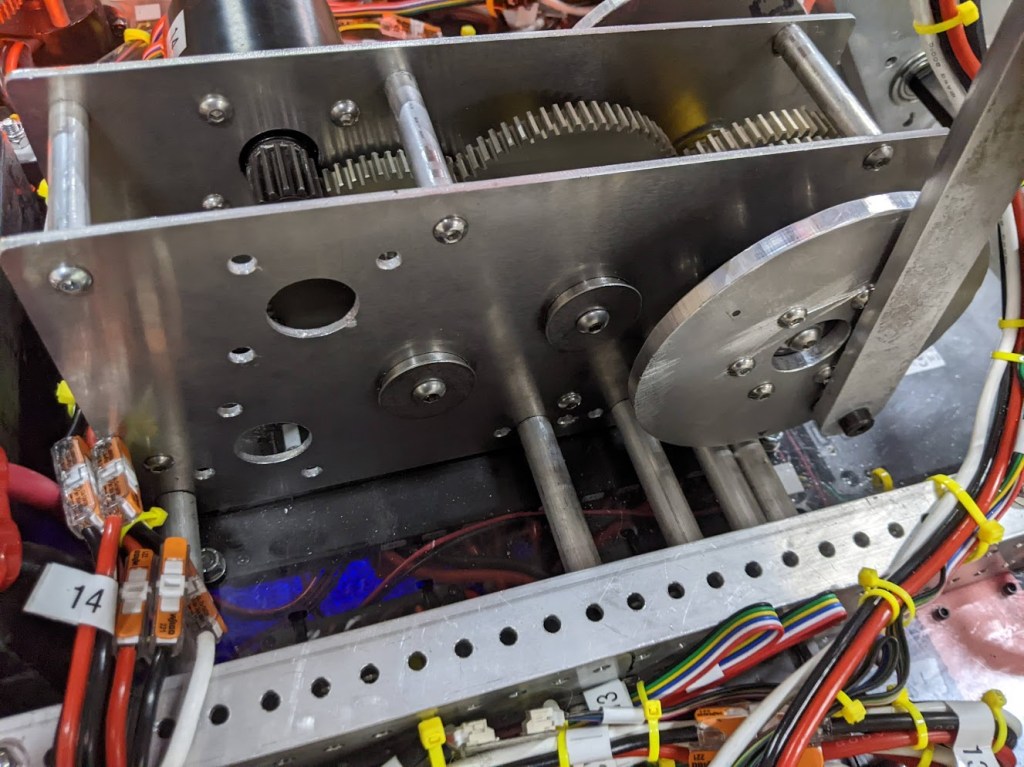
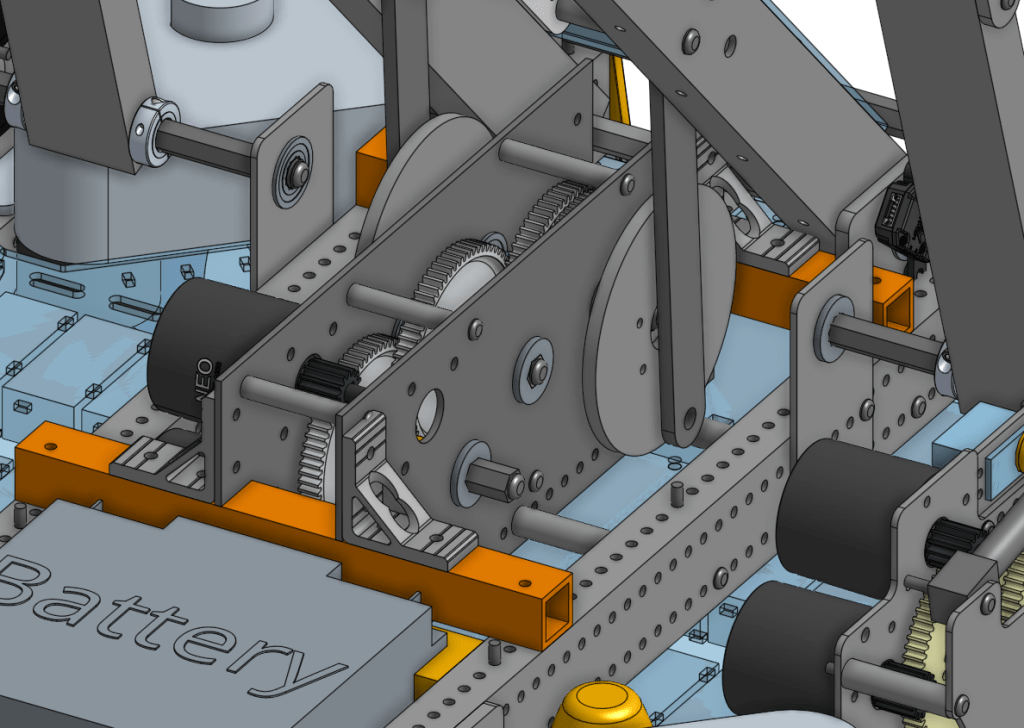
That’s the short term fix to buy us more testing and driving time until the real fix is manufactured. The real fix was finished in CAD last night. We are adding a 1″ x 1″ aluminum square tube across the 2″ x 1″ rail and adding a 90 degree bracket to transfer the load into the square tube. We got lucky on the packaging and were able to fit both 1″ x 1″ square tubes with out moving anything.
The arm programming is functionally complete at the moment. We added another state for the high scoring position. While we are approaching but not touching the grid we’ll hold the upper arm at 90 degree angle so we can just move the base to be in the scoring position. This reduces the chance of tipping and makes it less likely to hit the goal with the arm. The below video runs through all of the important positions for the arm.
We will be working to finalize the scoring routine and then trying to increase the speed a bit more on both joints. The buddy carry got the new gear box plates cut and assembly is under way. If all goes well we should be able to test it on Saturday.

Leave a comment