
The next iteration of intake went on the robot today. There was a clearance issue with the motor and the sweeper plate that had to get fixed by hand but everything else fit together. Below are two gifs, our first time intaking a cube and the first time scoring it into a high node.

We immediately noticed it is now harder to intake cones near a wall because of the added length on the intake. It also makes it slightly hard to fit inside frame perimeter while holding a cone. But we’ve already got the next iteration of the intake designed to fix both of those problems. The top roller will move inwards making the whole intake shorter(and lighter).

The programming team has been busy working on autonomous and ironing out the kinks with it. The auto balance is now working, just fine tuning paths and scoring. They’ve also been cramming to get the buddy carry code working. So far they have the CAM rotating and the servos deploying correctly and they might be ready to test it Tuesday.
The new and improved choochoo gear box was assembled fully today and is ready to be placed into the competition robot. It’ll get changed over once we get auto working and take a break from driver practice.
We’ve been having problems controlling the choochoo mechanism. The linkage that moves the arm up and down can rotate infinitely around a circle. For each arm angle there are two different spots the choochoo linkage could be in. Both images below have the same arm angle of ~82 degrees, but very different choochoo wheel positions.
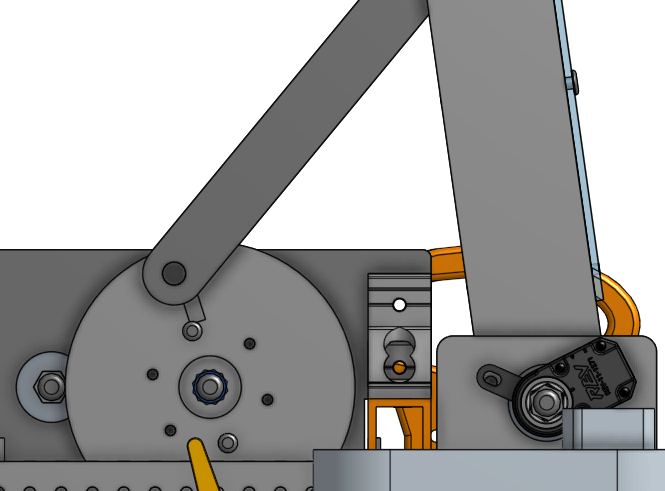
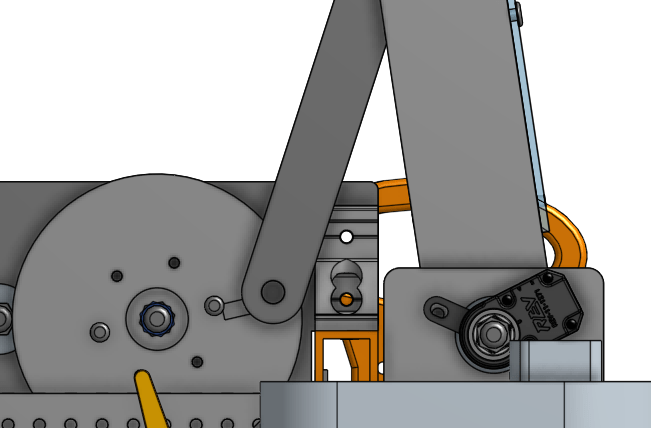
Adding to the problem, positive rotation of the wheel does not always result in positive rotation of the arm. At two spots in the wheel it switches and positive rotation will become negative rotation. Lets call these inversion points.
These two things become problems when we are controlling the arm with PID control, closed on the angle of the arm. The PID controller expects that positive rotation of the motor will result in positive angle change. This isn’t true once the arm moves past an inversion point. So far we’ve been trying to avoid the points of inversion. But that doesn’t always work. If we run the arm into something, it can get past the inversion point and the arm rapidly flies down smashing into things. Below is an example of us accidentally command the arm past the inversion point.
We think we know how to solve it but its a chunk of work that we need to sit down and get done. All before our first event on Thursday.

Leave a comment