
Thursday
Waco is only a short trip(less than 2 hours) from out shop in Austin. This allowed us to spend the morning in the shop making last minute adjustments to autonomous and arm control logic.

There were two small problems that happened in the above video, they’ll happen again. The robot was loaded on the trailer and the team departed for Waco.
Inspection went very quickly, the robot weighed in at 104.9 lbs. There were three things that made the inspection go so smoothly, brain pan, clean wiring and no pneumatic components. With no pneumatic components you get to skip a large chunk of the inspection checklist. I highly recommend it.
After inspection we had some time to perform some deferred maintenance. There was an issue with the intermediate shaft on our MKi4’s. We had this happen a few times in our shop but caught it before any major damage was done. Our replacement shafts arrived very quickly. Patrick from SDS handled this amazingly, clear communication, low cost fix, and super quick shipping. Thank you.

We got to take a short break while we sheltered in place and waited for severe storms to pass. Then we finished up replacing the shafts on the remaining swerve modules. Up next on the list was adding a second battery strap, replacing a few broken bumper mounting parts and adding the freshly painted sponsor panels.

Friday
Friday was a rough day for our team.
We managed to make it to two practice matches and got to play with some friends. The first two real matches went okay, our auto got stuck on the middle pole in the second match but we managed to recover. By the third match problems started to show. Our auto gets stuck on the middle pole again and the upper joint of the arm ends up in a bad state and becomes uncontrollable. We barely manage to climb on the charge station and wait out the remaining match time.
The next match goes even worse for us. Our auto gets stuck on the middle pole again and right at the end of autonomous our robot loses communication to the field and it doesn’t return. This was a weird one for us, on the diagnostics page we had a green light on the driver station for Robot, FMS and Radio. But the overall communications and robot code remained red.
Our robot sat dead on the field for the entire tele operated period. The FTA’s looked at the logs and couldn’t find anything that looked suspicious(I’ll grab the logs on Tuesday and post them). They suggested turning off domain fire wall(public and private were off) which we did. We had run 5 matches before this point and hadn’t had any communication issues before this. Not a great feeling heading back out to the field not knowing if your robot will communicate with the field.
The next match we ran an auto which doesn’t attempt to score, we managed to stay connected longer this time. Around 20 seconds in we had our battery fall out and quickly got disabled. A first for me in my FRC experience. This was a low point for a lot of the team three back to back failures.
Failure is an important part of the engineering process. Its expected, you can’t dwell you need to learn from failure, adapt and move on. At an FRC event you don’t have your shop, you have a limited amount of materials and you need to quickly make improvements to your robot. Below are some of the quick fixes we made between matches.
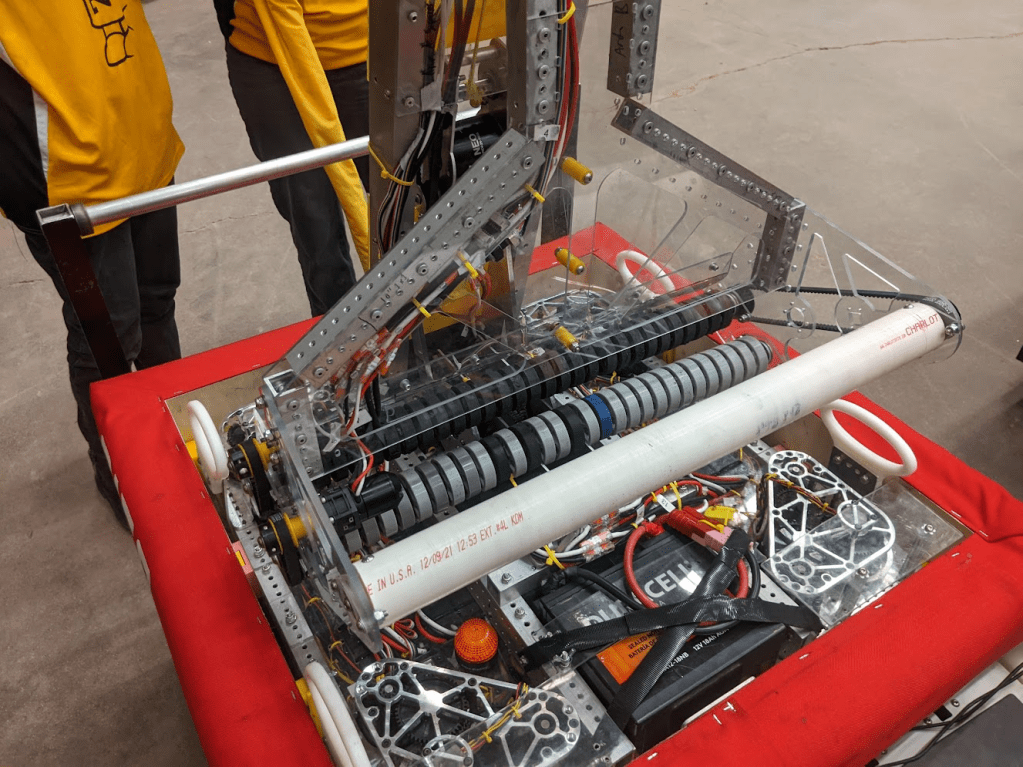
We added a poly carbonate plate to the battery that is retained with wing nuts. Also in this picture at the front left and right are two poly carbonate plates that prevent cones from getting stuck if our arm moves bounces too far back while moving.
The next major fix we made was adding a strike plate to the back side of the intake. This prevents us from getting stuck on the middle pole while scoring.
We ended the day with 4 wins and 5 loses and were ranked in the mid 20’s. This made the scouting meeting short, we shared stories and compiled a list of possible 3rd pick robots so we could contribute if we were picked by an alliance.
Saturday
Our goal for Saturday was simple, score as many game pieces as possible and create some momentum. I find once you have some momentum at an event you can snow ball and increase your teams performance. If we did well enough we might be picked early by teams who are doing last minute scouting.
We had three matches on Saturday and we managed to pick up 2 wins. In match 62 we scored 6 game pieces, and in match 72 and 78 we scored five game pieces. The drive team managed to create some much needed momentum for the team and carried it into play off matches.

The team ended up being picked by 7th seed Alliance captain’s 4610. We lost our first match in the double elimination tournament, won our second and lost the third match. Another Austin team 2881 Lady Cans who knocked us out in the third match went on to win the event! Super excited for them!
Overall double elimination tournament was great, there was plenty of time between matches to fix issues and it was nice having another chance after losing to the second seed Alliance. The one problem was that it was hard to figure out who your next match was against and what color bumpers you needed. I’m sure we’ll figure it out in a few years.
Small Problems
In the first .gif posted there were two problems, you can see the intake slightly bounce off of the middle pole and the battery breaks out of the velcro strap as we go over the cable protector.
The big lesson we learned here is that it is easy to ignore/put off small problems you have while at home. In the final days before our event we were busy focusing on larger problems and didn’t focus on what seemed to be small problems. We did attempt to fix the battery strap problem but didn’t have time to get the fix on and verify it at home.
What seems like a small problem at home can and will become a large problem once you are on the competition field. You don’t get a second chance during a match and they certainly don’t let you pause the match and strap your battery down again. Don’t ignore small problems that you manually fix or reset while testing your robot, you don’t get the chance to do that during an event!

Leave a comment