
Its been a bit of a slow week for the team, everyone is recovering from competition at Waco. That hasn’t stopped us from releasing the chain driven iteration of the arm’s second joint.
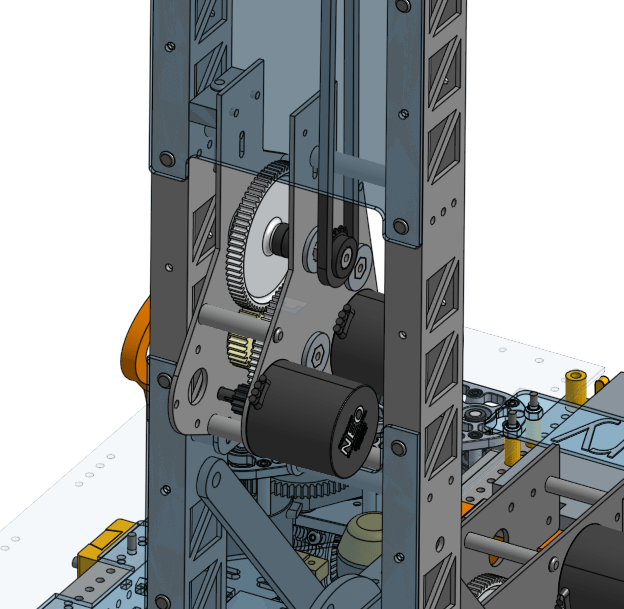


The new chain powered arm has two idlers at the top so we can route the chain inside of the arm’s poly carbonate covers. This prevents the chain from destroying our sponsor plate. The chain version is .1 seconds slower than our current winch iteration, it is able to rotate 90 degrees in .549 seconds. But it is able to be powered backwards and should be able to lock and hold a positions better.
All of the parts for the chain powered conversion were released to manufacturing late last night. Manufacturing has been busy assembling our second robot so we can increase our iteration speed and give programming(and drive team) more time on the robot. The second robot uses the practice swerve drive base. The choochoo gearbox is mounted to the drive base and the arm was fully assembled last night. All that is left is to finish up the intake and mount them both to the practice bot.


Leave a comment