
Over the past two days we’ve been working hard to get both robots up and running. The practice bot got its arm and intake attached. Tonight it’s arm ran for the first time. It took longer than desired to get everything working because we had to clean up messy wiring along the way.
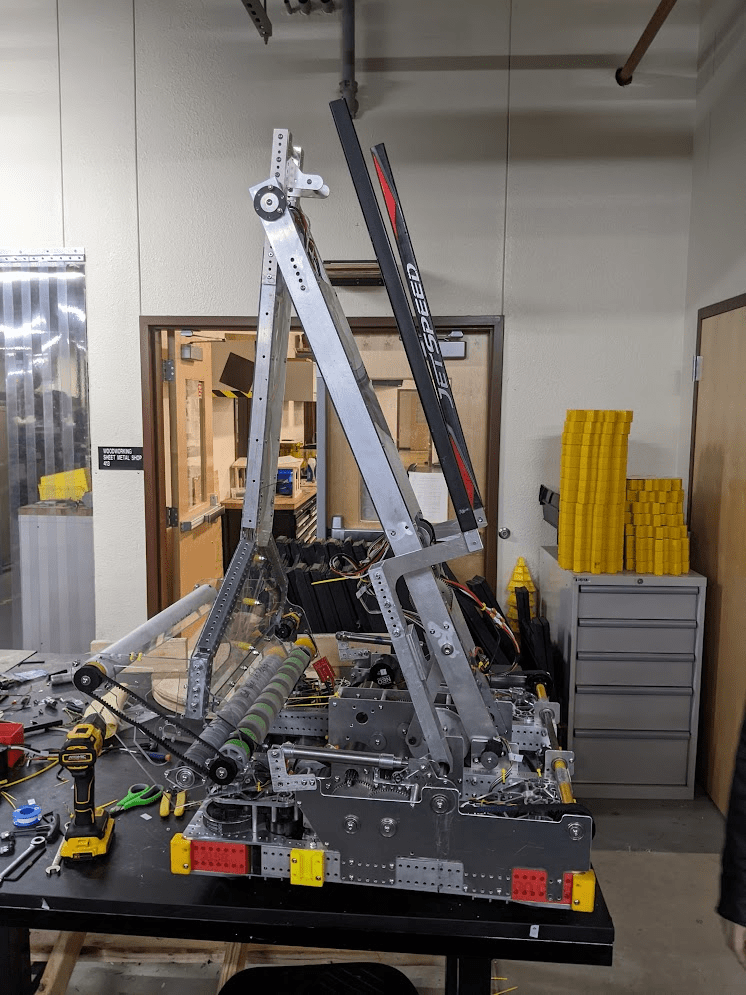
The practice robot with the buddy carry attached. The buddy carry was finally tested today with a the full weight practice bot. Unfortunately a video wasn’t recorded. I’ll try to get one on Tuesday. I heard it didn’t work well and had problems with balance and keeping enough weight on all four swerve modules. It struggled driving up the charge station. It does look cool though.
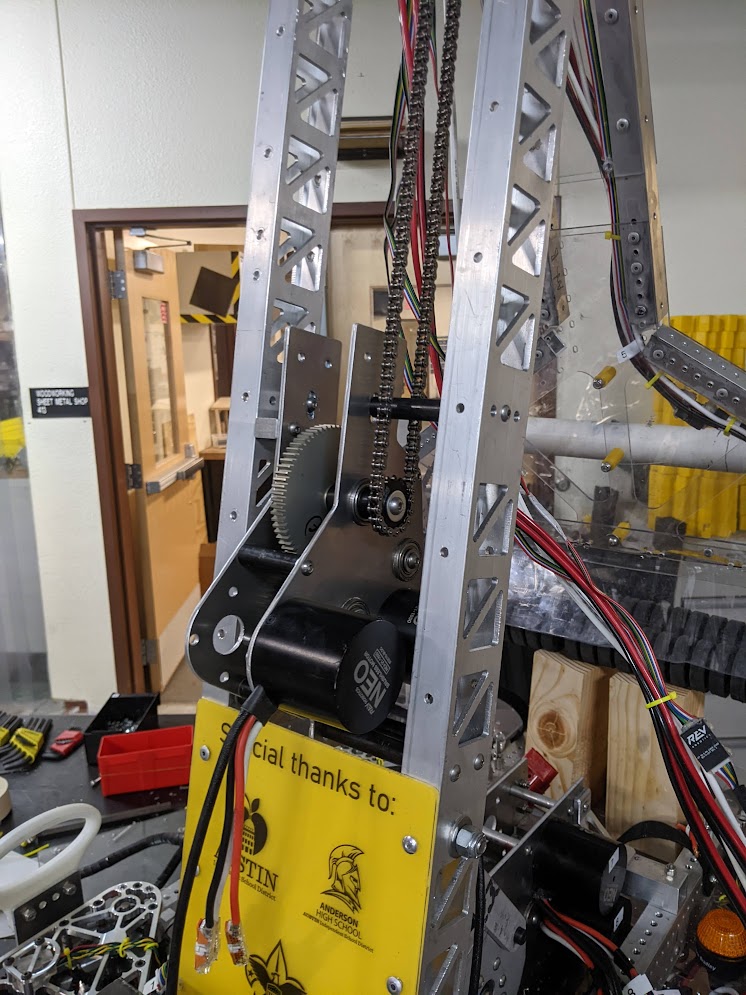
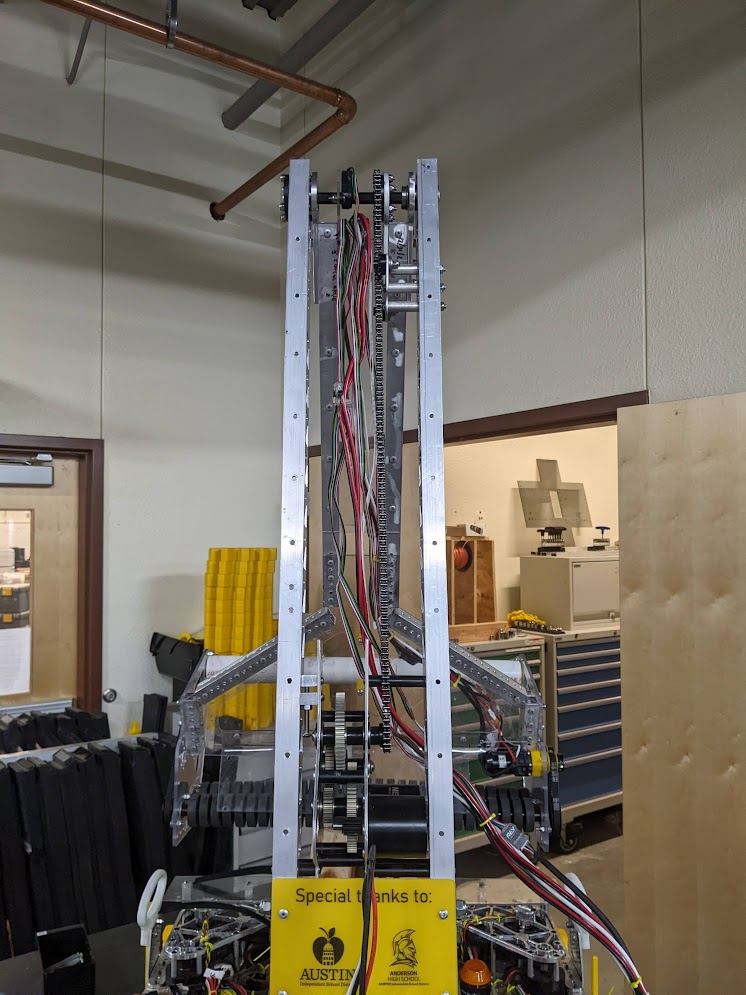
Today we took the competition robot down for an upgrade. The second joint’s chain conversion had all of the parts manufactured and we were ready to put it on a robot. The chain gear box was assembled and mounted to the arm. The lightened arm rails, top joints and idlers all got put on the competition robot. We’ve still got to re attach the poly carbonate plates and hook up the wiring but we are closer to having the chain upgrade ready to test.

There are a few changes for the arm’s programming involved with the chain upgrade but if everything goes well we can start testing / using it on Tuesday.

Leave a comment